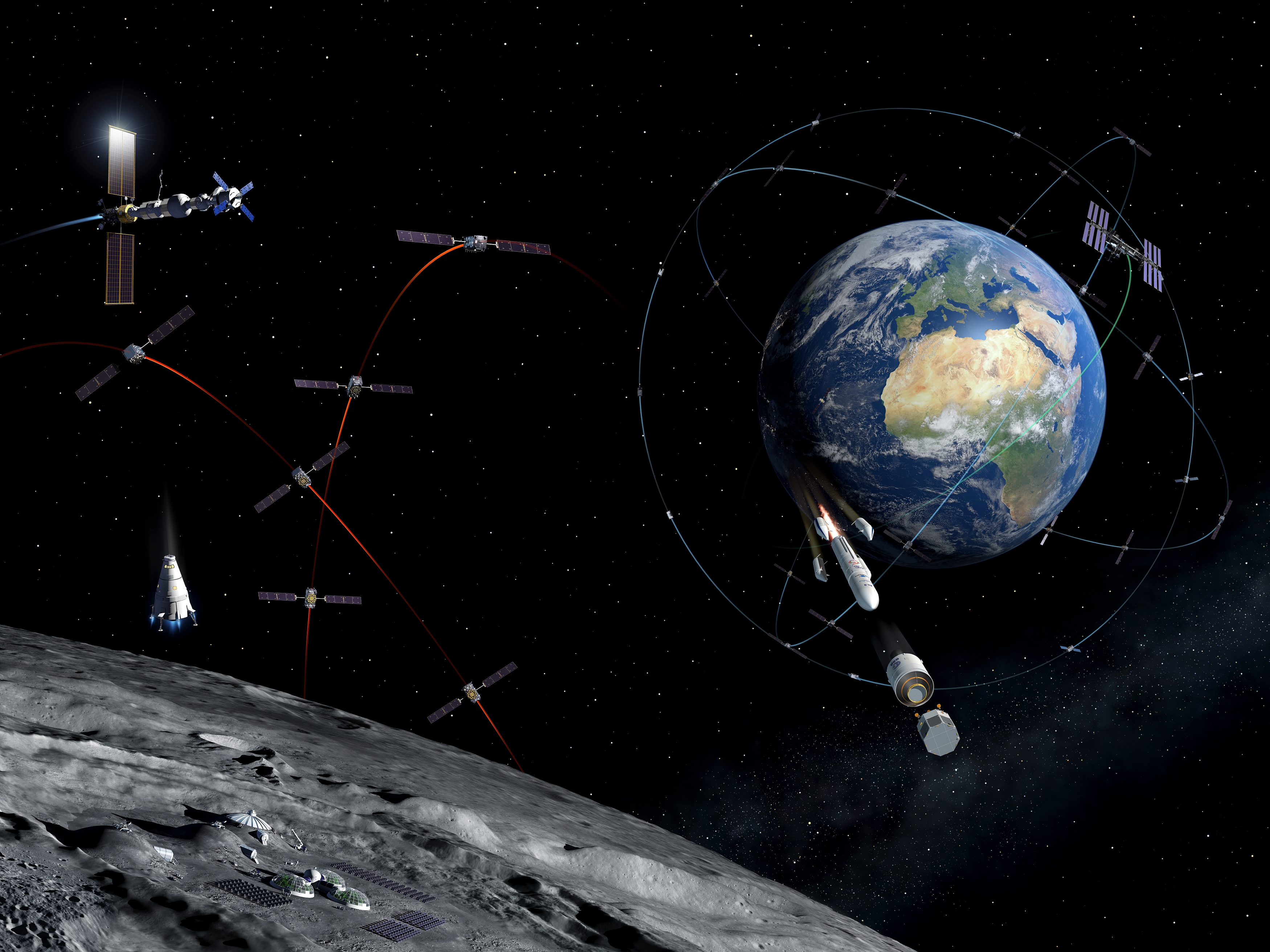
Evropská mise Lunar Pathfinder má k Měsíci dopravit pokročilý přijímač navigačních signálů, který tu provede historicky první určení pozice na oběžné dráze kolem Měsíce při využití zemského navigačního systému. Experimentální zařízení má představovat první malý krok k velkému cíli Evropské kosmické agentury – rozšířit v průběhu tohoto desetileté pokrytí spolehlivého navigačního systému včetně jeho komunikačních linek i k průzkumníkům na oběžné dráze Měsíce a jednou i k těm na jeho povrchu. Lunar Pathfinder, jehož start je plánován na konec roku 2023, má zajistit komerční retranslační služby pro lunární mise, ale také posune provozní možnosti navigačních družic.

Zdroj: https://www.esa.int/
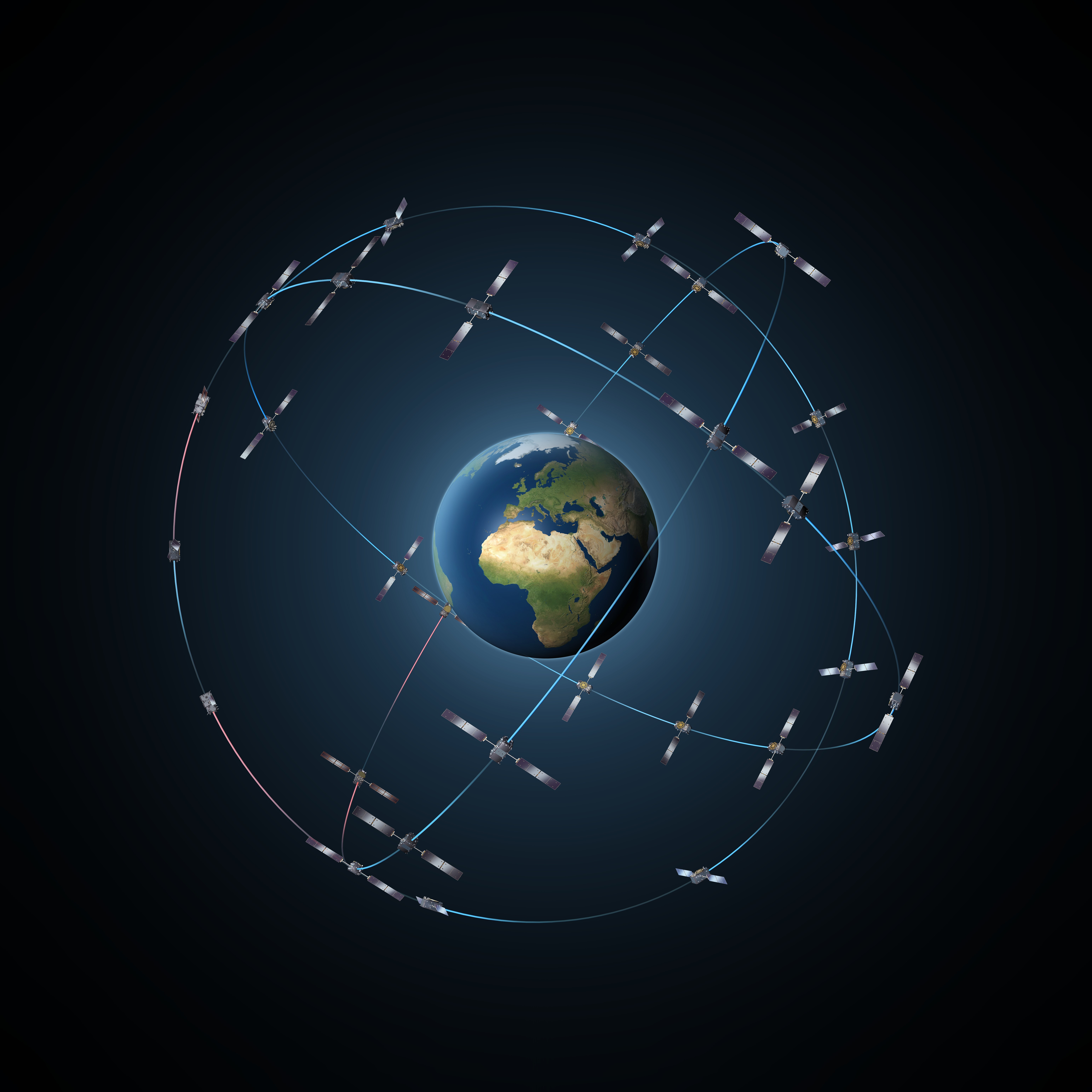
Navigační systémy jako je třeba Galileo jsou stavěné k tomu, aby poskytovaly údaje o pozici, navigaci a přesném čase na naší planetě. Většina energie z navigačních antén těchto družic proto míří přímo k Zemi, čímž je blokována možnost dalšího využití těchto signálů v kosmickém prostoru. „To ale není celá pravda,“ vysvětluje Javier Ventura-Traveset, vedoucí Galileo Navigation Science Office a koordinátor aktivit ESA v oblasti lunární navigace a dodává: „Vzory navigačních signálů ale také míří trochu stranou – podobně jako světlo z baterky. Dřívější testy navíc ukázaly, že tyto „postranní laloky“ antény lze využít k určování polohy. Tedy pouze za předpokladu, že jsou použity odpovídající přijímače.“

Zdroj: https://www.esa.int/
Stejně jako lidé či auta na Zemi se i družice na nízké oběžné dráze spoléhají na signály navigačních družic, aby určily svou pozici na oběžné dráze. Když ESA prokázala, že se dá tento systém využít i pro vyšší oběžné dráhy, začal se zvyšovat počet družic na geostacionární dráze, které na své palubě nesou přijímače navigačních signálů. Jenže geostacionární dráha leží ve výšce 35 786 kilometrů, zatímco Měsíc je od Země průměrně 384 000 kilometrů daleko. V roce 2019 však americké sondy Magnetospheric Multiscale Mission dokázaly zachytit GPS signály, provést příslušnou korekci a určit svou dráhu ve vzdálenosti 187 166 kilometrů, což zhruba odpovídá polovině vzdálenosti mezi Zemí a Měsícem.
„Tento úspěšný experimentální důkaz nám dává velkou důvěru, jelikož přijímač, který použijeme na Lunar Pathfinderu bude mít výrazně zvýšenou citlivosti, má být schopen pracovat jak s daty družic GPS i Galileo a také bude mít k dispozici vysokoziskovou navigační anténu,“ popisuje Ventura-Traveset. Tato hlavní anténa velmi citlivého hlavního přijímače byla vyvinuta v rámci projektu ESA General Support Technology Programme. O vývoj hlavní jednotky přijímače se pak postaral další program ESA, tentokrát NAVISP (Navigation Innovation and Support Programme).
Zdroj: https://www.esa.int/
Projekt přijímače vede Pietro Giordano, navigační inženýr Evropské kosmické agentury, který říká: „Vysoce citlivý přijímač bude schopen detekovat velmi slabé signály, které jsou milionkrát slabší, než jaké zachytáváme na Zemi. Použití pokročilých palubních orbitálních filtrů nám umožní dosáhnout nevídané přesnosti určování oběžné dráhy a navíc na autonomní úrovni.“ Abychom se ale nebavili jen o obecných údajích, přijímač Lunar Pathfinderu má být schopen dosáhnout přesnosti určení pozice na 100 metrů, což je přesnější než dosavadní metody pozemního sledování.
Dostupnost signálu navigačních družic umožní provádět přesné určení oběžné dráhy lunárních sond, o čemž hovoří Werner Enderle, z Navigation Support Office v rámci ESA: „Tradiční metody určování oběžných drah sond obíhajících kolem Měsíce se provádí pomocí rádiových měření s využitím pozemních stanic pro komunikaci s hlubším vesmírem. Demonstrace Lunar Pathfinderu bude významným milníkem vstříc lunární navigaci, která změní celý dosavadní přístup. Nejenže dojde ke zvýšení autonomie sond a zlepšení přesnosti jejich výsledků, ale také to pomůže snížit provozní náklady.“

ZdroJ: https://www.esa.int/
Lunární oběžné dráhy jsou často nestabilní – dráhy nízko letících družic bývají ovlivňovány odlišnými úrovněmi gravitace, která mají na svědomí shluky hmoty, ze které je Měsíc tvořen. Lunar Pathfinder se z tohoto důvodu usadí na velmi stabilní eliptické dráze, která bude navíc zaměřena na jižní pól – hlavní cíl budoucích výprav. Země a její navigační sítě by měly zůstat v dohledu Lunar Pathfinderu po většinu času zkoušek. Hlavní výzvou bude překonání omezené geometrie navigačních signálů, které budou všechny přicházet ze stejné části oblohy – svůj vliv bude mít i zmíněná nízká intenzita tohoto signálu.

Zdroj: https://www.esa.int/
Demonstrace využití družicových navigačních systémů by mohla posloužit k tomu, aby se tento systém integroval do prvních kroků projektu Moonlight initiative od ESA. Ten již má podporu tří direktoriátů ESA a jeho cílem je zajistit lunární komunikační a navigační služby. „Během následujícího desetiletí se chce ESA podílet na vytvoření společné komunikační a navigační infrastruktury pro všechny lunární mise, která bude založena na vyhrazených lunárních sondách,“ vysvětluje Bernhard Hufenbach, vedoucí komercializace a inovačních iniciativ pro průzkum kosmického prostoru v ESA a dodává: „Moonlight nabídne podporu misí, které nemohou využívat signály navigačních družic u Země – to jsou třeba přistávací moduly na odvrácené straně. Stejně tak má překonat současnou mezeru směrem k potřebám, které vyjádřila komunita Global Exploration. Jde především o přesnost umístění pod 50 metrů.“
Kromě usnadnění průzkumu Měsíce by se tyto signály navigačních družic mohly jednoho dne stát samostatným vědeckým prostředkem. Ten by se dal využít třeba k provádění reflektometrie povrchu Měsíce, skenování mizivě řídké prašné exosféry, která obklopuje Měsíc, nebo k poskytnutí společného časového referenčního signálu k Měsíci a zpět, který se použije pro základní fyzikální nebo astronomické experimenty. Jak říká Ventura-Traveset, nepůjde pouze o historicky první využití satelitní navigace u Měsíce, ale navigační experiment Lunar Pathfinderu bude mít větší důsledky: „Stane se vůbec první ukázkou přijímání GPS a Galileo na měsíční oběžné dráze. Tím se zcela otevřou dveře mnoha možností – třeba jak navigovat kosmickou loď v hlubokém vesmíru a také umožnit pilotovaný průzkum Měsíce.“
Přeloženo z:
https://www.esa.int/
Zdroje obrázků:
https://www.esa.int/…/17455291-1-eng-GB/Lunar_Ride_and_Phone_Home_Service.png
https://www.esa.int/…/23216616-1-eng-GB/Galileo_side_lobe_signals.jpg
https://www.esa.int/…/14631968-1-eng-GB/Galileo_constellation.jpg
https://www.esa.int/…/Lunar_Pathfinder_will_focus_coverage_on_the_Moon_s_south_pole.png
https://www.esa.int/…/2017/05/the_moon2/16937707-1-eng-GB/The_Moon.jpg
https://www.esa.int/…/23216528-1-eng-GB/Extending_satnav_to_the_Moon.jpg







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Představuji si, jak by to tak mohlo fungovat: gnss satelity létají kolem 20 tisíc km nad Zemí, čili nejodlehlejší z nich budou 20+20+12=52 tisíc km od sebe, to je asi 15 měsíčních poloměrů, čili 7,5° na měsíčním nebi. To je příliš špičatý trojúhelník pro triangulaci. Ale pokud by přijímali třeba 50 satelitů najednou, možná by to nějaké rozumné výsledky dávalo.
Myslím, že ten úhel není zase tak velký problém, resp. patrně je jen pro jeden rozměr (vzdálenost od Země). GPS totiž není „obyčejná“ triangulace. Když to zjednodušíme, tak družice vysílá čas a svou přesnou polohu. Pokud tedy zachytím současně ze dvou družic stejnou časovou značku, tak se zrovna nacházím někde v rovině, která je kolmá na osu úsečky mezi družicemi a rovina úsečku protíná uprostřed vzdálenosti družic. Pokud je tam nějaký časový posun (tj. signál z jedné družice zachytím dřív, než z druhé) vlivem konečné rychlosti světla, tak se nacházím někde na ploše rotačního hyperboloidu, kde ohniska jsou ony dvě družice a tvar toho hyperboloidu závisí na tom časovém posunu. GPS přijímače tak logicky potřebují více dvojic družic, aby našly společný průsečík několika takových ploch a tím určily svou vlastní polohu. Když budeme daleko, tak se dá říci, že se ten hyperboloid bude hodně blížit ploše kuželu, což výpočty může zjednodušit (otázka je, jestli je Měsíc z tohoto pohledu dost daleko a patrně k tomu není z výpočetního hlediska důvod). Ale pořád platí, že když u Měsíce (nebo třeba u Jupiteru) zachytím současně signál ze dvou družic, tak se nacházím v oné rovině (popř. s časovým posunem na ploše příslušného kuželu). Pokud zachytím jinou dvojici z družic, které jsou v jiné rovině (ideálně kolmo na tu první), tak průsečík oněch dvou „kuželových“ ploch vymezí křivku (ve velkých vzdálenostech de-facto přímku), kde se nacházím. Chyba určení polohy nebude závislá na úhlové vzdálenosti těch družic od sebe při pohledu pozorovatele, ale jen na přesnosti měření časové diference (tj. tvaru oné plochy) a přesnosti určení polohy GPS družic. Každá chyba se vlivem vzdálenosti samozřejmě projeví s odpovídající „pákou“, ale pozorovací úhel můžeme vynechat.
Dokonce si lze představit speciální situaci, kdy pokud bych zachytil časovou diferenci přesně odpovídající okamžité vzdálenosti dvou GPS satelitů, tak vím, že se nacházím někde na přímce spojující obě družice (resp. na polopřímce směrem „od“ toho satelitu, jehož signál jsem zachytil dříve). Úhlová vzdálenost je v takovém okamžiku nulová, a přesto vím o své pozici hodně. Chybí jen vzdálenost, tj. pozice na té přímce. A teprve tady se projeví fakt, že jsme daleko, tím, že ony prostorové kuželosečky budou v této vzdálenosti hodně „rovnoběžné“ (což je způsobeno tou malou úhlovou vzdálenosti, o které píšete).
Je otázka, zda si v tomto ohledu nemohou pomoci tím, že družice bude mít na palubě atomové hodiny (nebo obdobný velmi přesný zdroj časového signálu) a po určité kalibraci by tak svou vzdálenost mohla určovat vlastně přímo z toho, za jak dlouho k ní signál od GPS družice přiletěl. Takový přístup by byl na Zemi nadbytečný a cenu mobilů by atomové hodiny dost prodražily, ale pro družici je to asi přijatelné finančně i technicky.
Hlavním problémem tak bude „síla“ signálu (jak ostatně uvádí i článek) a nepříjemné bude také to, že družice bude v poměrně rychlém vlastním pohybu, což výpočty právě neusnadní.
Problémem je přesnost s jakou známe veličiny výpočtu a existuje něco, čemu se říká zákon hromadění chyb, který činí výpočty za určitými hranicemi nepoužitelné i když teoreticky by mohly fungovat. A to je právě problém družic GNSS na oběžných drahách Země a přijímače u Měsíce, který už je třeba za hranicí užitečné přednosti.
Ale třeba pro pobyt kosmonautů na povrchu existují možnosti, jak přesnost zvýšit. Jako je systém CZEPOS, který dokáže zvýšit přesnost gnss z metrů na pár centimetrů. Když by na landeru byl přijímač, mohl by kosmonautům na výjezdu posílat korekce na místní systém a zlepšit přesnost z výše zmiňovaných stovek metrů na jednotky metrů.
Je trochu paradoxní, že přijímač u Měsíce bude znát veličiny výpočtů možná s lepší přesností, než přijímače na Zemi. Signály totiž nebudou zkresleny vrstvami atmosféry (především ionosférou). Tj. hlavní problém je ta citlivost.
Takto dopodrobna to neznám, ale vždycky jsem měl za to, že data o poloze družic jsou pro veřejné civilní účely poskytována záměrně jen s určitou přesností. Původně byla plná přesnost vyhrazena jen pro vojenské aplikace, později byla zpřístupněna jako placená služba např. právě pro geodety (což je právě ta služba CZEPOS). Je-li tomu tak, tak určitě platí, že satelit Moonlight dostane nejpřesnější dostupné údaje. Jejich přesnost je samozřejmě konečná a s rostoucí vzdáleností od družic poroste i chyba, kterou to způsobuje. I proto je ambice určit polohu s chybou do 100 metrů a ne na metry či centimetry :-). Pav69 správně uvádí, že situace u Měsíce bude zase jednodušší vzhledem k neovlivnění dat ionosférou.
Jinak cílem je nyní získat co nejpřesnější polohu družice, což pak může pomoci navigovat landery – pokud bude družice znát svou vlastní polohu s přesností na 100 metrů, tak lze udělat síť družic, které budou dělat pro landery obdobnou službu, jako dělají GPS družice pro nás na Zemi. To by umožňovalo spolehlivou navigaci např. pro přistání s přesností na řádově (malé) stovky metrů a i to by moc pomohlo.
Pro obyčejnou navigaci (civilní i vojenskou) se používají souřadnice družic, které se vysílají spolu s kódovým navigačním signálem, tzv. vysílané efemeridy, a by jsou spočteny předem podle předpokládané dráhy letu. Pro přesnost navigace je pak rozhodující jaký navigační signály přijímač používá a jak přesný čas v něm je. Pro civily méně přesný, pro vojáky přesnější. Ti v reálném čase mají přesnost 20 až 30 cm, my 2 až 5 metrů. Pro velmi přesná měření lze pak stáhnout souřadnice družic určené zpětně z měření speciálních stanic. Ale hlavně se používá tzv. fázové měření s využitím více přijímačů. Na tom je založená síť CZEPOS, která přijímá signály z asi čtyřiceti stanic, kde jsou známé souřadnice. Když se k ní geodet připojí, aparatura pošle CZEPOSu přibližné souradníce a ten jí vrátí korekce, které dokážou zpřesnit polohu na centimetr. Využívá se toho, že se nedělá triangulace na 20 tisíc km, ale jen na pár desítek kilometrů k stanicím CZEPOSu
Díky za vysvětlení, zase jsem o něco chytřejší 🙂
Ano, dříve byl signál šifrován (u GPS) takže vojáci měli plnou přesnost a civilisti kolem 50 metrů, ale to už se dávno nepoužívá. Poloha družic v navigační zprávě byla myslím uváděná na celé metry. Nevím, jestli armáda má nějakou druhou lepší navigační zprávu (ta klasická je obsažená v signálu GPS a vysílá se myslím pravidelně každých cca 15 minut – takže pokud máte „starou GPS“, ty v mobilu si po internetu šáhnou pro navigační zprávu online, a vytáhnete jí ze šuplíku po delší době, tak po zapnutí jí bude trvat nějakou dobu než se chytne – než zachytí navigační zprávu).
Normální (navigační, turistické) měření probíhá kódově (GPS družice vysílá v podstatě pouze časový kód) a z jeho zpoždění se určuje vzdálenost. Kdežto přesné geodetické určování polohy používá fázová měření n celých vlnových délek + doměrek a určovaná proměná je právě to n (vychází se z kódového měření a i tak v té přesnosti máte těch vlnových délek několik, ale jak měříte na více satelitů tak některé hodnoty n nevycházejí pro všechny satelity a některé jo). Sítě jako CZEPOS a podobné pak slouží k upřesnění měření. Přehled sítí (jsou v ČR 4) a jejich jednotlivých stanovišť najdete zde:
https://oko.pecny.cz/monitor/
Největší nepřesnost v GPS je díky naší atmosféře, ale pokud máte v blízkosti (cca 30km) referenční stanici (o známých souřadnicích) můžete považovat chybu u referenční stanice i u ruční GPS za shodnou (nejenom ve velikosti ale i ve směru!). Takže pokud v reálném čase příjmáte data z referenční sítě, máte přesnost GPS na cm. Jak jsem na začátku tohodle příspěvku mluvil o tom že vojáci mohli přesnost zašifrovat, tak to se dělalo tak že se uměle zavedla pseudonáhodná chyba do času družice (do atomových hodin na družici) a tím se snížila přesnost. Ta chyba se tváří jako náhodná, ale není, když znáte kód (nějaké číslo) a to dosadíte do patřičné rovnice jste schopen dopočítat uměle zavedenou chybu atomových hodin a určovat polohu přesně. Pokud používáte ale CZEPOS a podobné sítě tak tohle vůbec řešit nemusíte, protože ta uměle zavedená chyba má stejný vliv jak na váš příjmač, tak na referenční stanici a tudíž se odečte.
Děkuji za zajímavý článek. Tohle vypadá opravdu na pěkný a praktický projekt od ESA a je skvělé číst, že se na takové věci pracuje. A pro mě osobně byla zajímavá i ta malá lekce z poměrů „nebeských vzdáleností“: např. by mě nikdy nenapadlo, že geostacionární dráha je cca desetina vzdálenosti Země-Měsíc, pořád jsem je bral jako sice vysoko, ale „lokální u Země“.
Z hlediska toho projektu už psal Kamil nade mnou: pořád je to hodně ostrý úhel, tak jsem zvědavý, jak se s tím popasují.
Myslíte si, že u Měsíce někdy bude lunolokační systém (měsíční GPS)? A kdy?
Zemská GPS má v současnosti dle wiki 31 družic. Měsíc má poloměr 4× menší než Země, tedy povrch je 16× menší. Asi by tedy stačilo méně družic. Navíc u Měsíčního systému neni potreba, aby se šlo orientovat na metr přesně s příjmačem, co se vejde do mobilu/hodinek. Jako bonus tam není atmosfera, co všechnu komunikaci kazí. Já si tedy troufám optimitsticky tipnout, že nějaký měsíční lokační systém by mohl vzniknout do roku 2040. Ale pokud se podaří tam použít GPS, tak klobouk dolů, to je nejlepší řešení.
Navigace na Měsíci se vůbec nemusí podobat té na Zemi. Co třeba umístit tři čtyři družice na dráhy kolem Lagrangeova bodu L1? Byly by vidět z celé přivrácené polokoule a na rozdíl od těch družic GNSS by byly je 60 tisíc km daleko a mohly by mít lepší úhel pro triangulaci, pokud by byly na měsíční obloze aspoň 30° od sebe, myslím že by to už mohlo normálně fungovat. A ty družice by mohly sloužit i jako retranslační a snímkovací
Ta vzdálenost není zas tak rozhodující, stačí použít směrovější (s menším stupěm vyzařování) antény a je to. Podle toho co jste psal panu PetrDub, tak jste taky geodet? Potom by jste měl vědět že ten pozorovací úhel důležitý je a celkem dost. Vzdálenost změříme pomocí GPS celkem přesně, ale pokud je to pod malým úhlem, tak i malá nepřesnost v délce udělá velkou chybu v kolmém směru (v 3D je kolmý směr celá rovina).
Daleko lepší by bylo dát navigační družice i do L4 a L5 se směrovou anténou k Měsíci.