
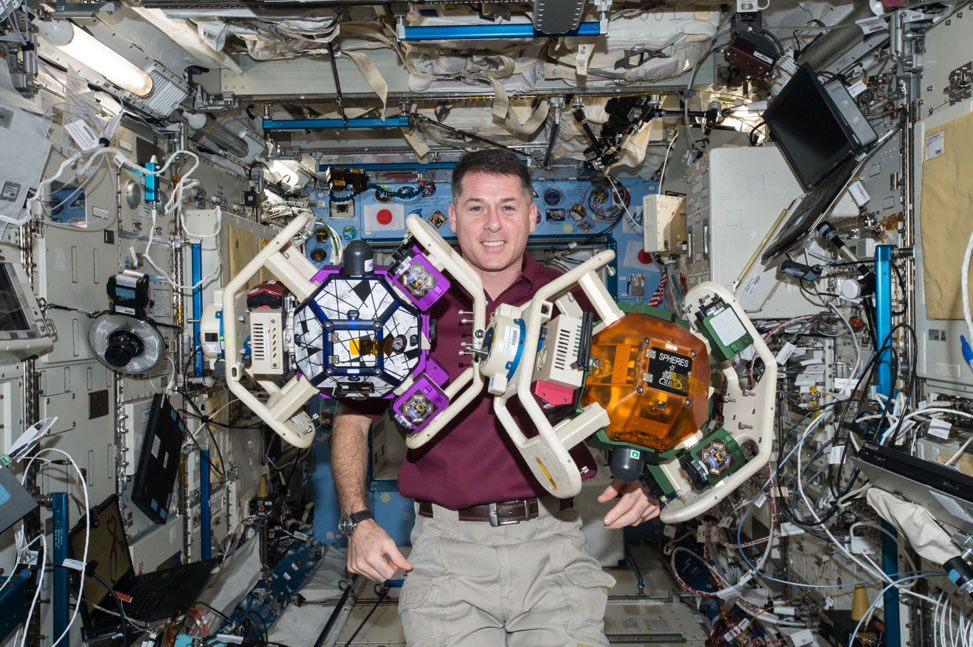
V průběhu roku 2006 byly v rámci misí Progresu M-56, STS-121 a 116 na ISS dopraveny tři různobarevné koule, každá o průměru 21 cm a hmotnosti 4,1 kg. Ve skutečnosti se tedy jednalo o hranaté 18 stěny a s lehkou nadsázkou se dá říct, že nástupem do služby navýšily počet členů stálých posádek. Projekt SPHERE se nepochybně stal prvním krokem ke standardnímu zapojení robotů do pilotovaného kosmického programu, ale k hemžení droidů tak, jak jej známe například ze ságy Star Wars má daleko.
Zdroj: https://www.nasa.gov/
SPHERE se skládá z letky 3 volně letících satelitů, které testují rozmanitý, pro ně vyvinutý hardware a software. Tento projekt, řízený z Amesova centra NASA v Moffett Field v Kalifornii, má za sebou téměř 600 hodin ostrého provozu během více než 12 let, jehož vyvrcholením bylo sedmitýdenní období nepřetržitého testování v únoru 2017. V prvních dvou měsících onoho roku systém absolvoval 9 testů, z nichž 4 proběhly v průběhu jednoho týdne. Standardně tyto testy probíhají jednou za 4-8 týdnů. Zmiňovaných devět testů si vyžádalo celkem 61 hodin provozu systému a celkem více jak 100 hodin práce posádky, protože některé testy vyžadují součinnost více astronautů. Testy zahrnovaly pokusy s pěti nejrůznějšími konfiguracemi robotů a podílela se na nich čtveřice astronautů. Na Zemi se do testování vedle Amesova centra zapojili např. MIT v Bostonu, KSC na Floridě a houstonské středisko společnosti Airbus Defence. Tolik jen pro představu, co je také náplní práce posádek ISS.

Zdroj: https://spectrum.ieee.org/
Na rozdíl od Robonauta, který si na svůj čas bude muset ještě chvíli počkat, se SPHERE ukázal jako krok správným směrem. Astronauti by nepochybně přivítali pomoc při plnění svých úkolů. Žonglování s prioritami a časovými rozvrhy je nedílnou součástí každodenního života na palubě ISS, stejně jako permanentní snaha letových řídících na Zemi o optimální náplň času stráveného ve vesmíru. Zapojení robotů do rutinních či jednoduchých činností může výrazně přispět k efektivnějšímu využití času stráveného na Mezinárodní kosmické stanici. Roboti mohou převzít inventarizaci zásob, dokumentovat průběh experimentů, případně pomoct při vykládce kosmických náklaďáků a monitorování provozu ISS. Zároveň jsou samy o sobě experimentem a platformou pro testování jak softwaru, tak nejrůznějších periferií.
Vítejte na palubě
Zdroj: https://www.nasa.gov/
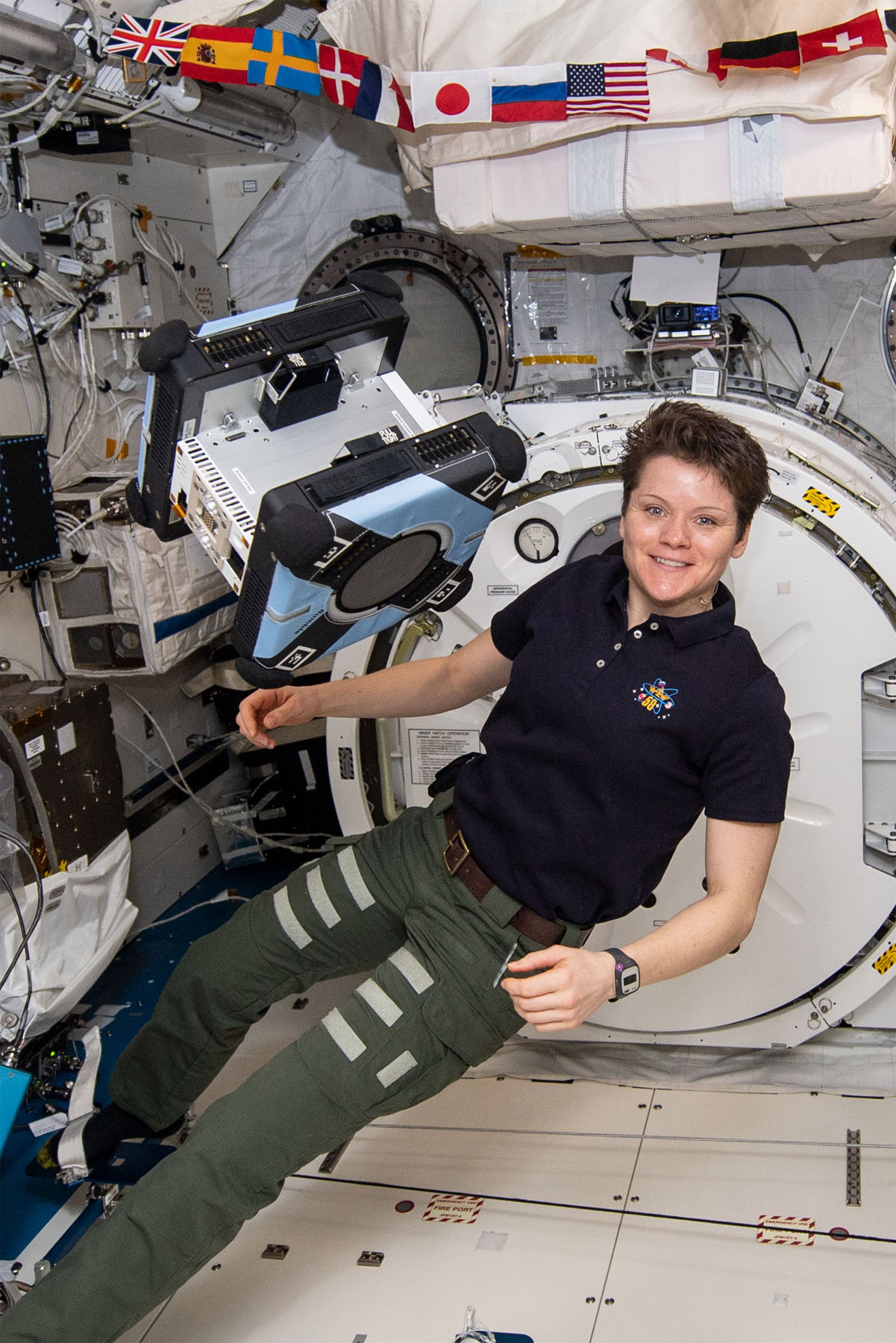
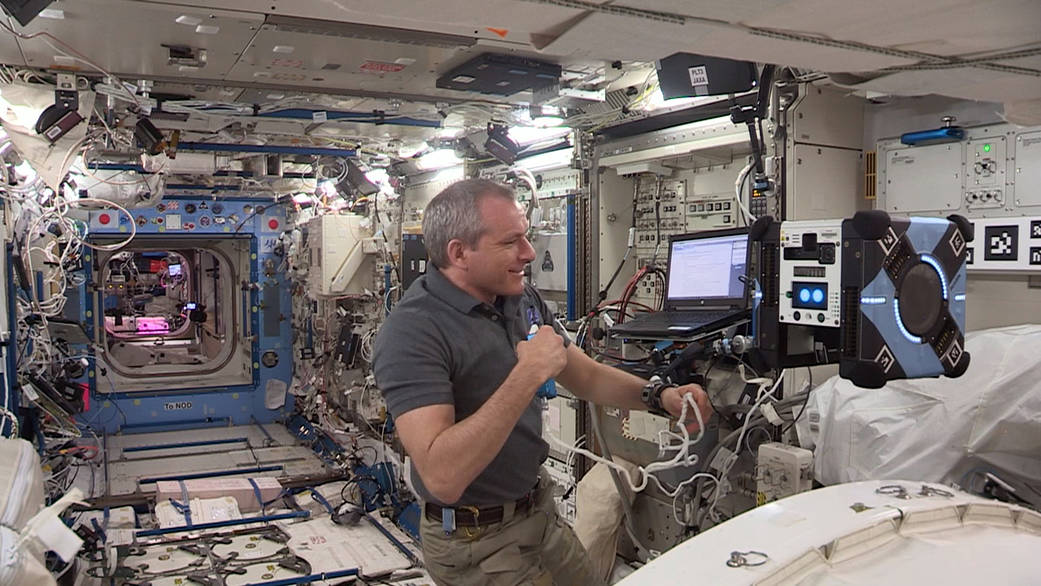
Proto se v loňském roce na mezinárodní stanici objevila trojice pilných včelek ASTROBEE. Jedná se o druhou generaci těchto volně létajících robotů, a jak jejich akronym naznačuje, čeká je o dost náročnější program než jejich předchůdce. Na stanici postupně dorazili jako užitečné zařízení zásobovacích misí NG-10 (17.11.2018, dokovací stanice), NG-11 (17.4.2019, dvojice robotů Bumble a Honey) a CRS-18 (25.7.2019, „záložní exemplář“ Queen). 15. února 2019 byla v modulu KIBO nainstalována dokovací stanice a 30. dubna pak Anne McClainová vybalila prvního z trojice astrobotů Astrobee – Bumble. Ve spolupráci s týmem Amesova střediska NASA zahájila úvodní kontrolu jeho systémů, kterou úspěšně dokončila 16. května.
Pojďme si představit tyto včelky blíže. Vývoj a řízení programu Astrobee opět spadá pod Amesovo výzkumné středisko NASA v Silikon Valley, manažerem projektu je Maria Bualatová. Projekt byl zahájen v roce 2014 jako součást programu NASA „Human Exploration Telerobotics -HET 2“. Programové vybavení zajišťuje JPL v kalifornské Passadeně. Astrobee oproti první generaci nabobtnali.
Zdroj: https://techcrunch.com/
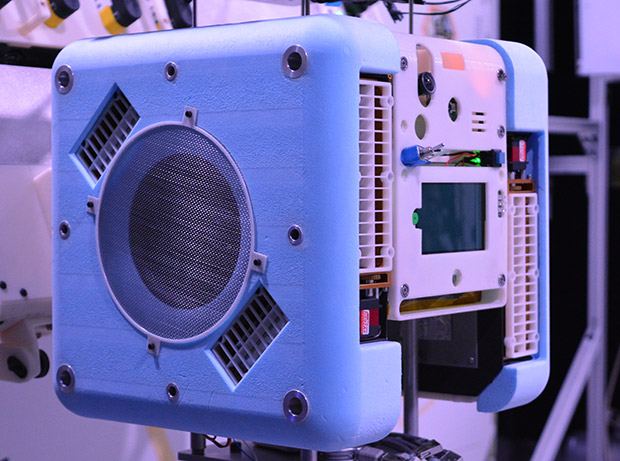
Na rozdíl od SPHERE mají tentokrát tvar krychle o hraně 32 cm s nomexovým povrchem, jejíž rohy jsou chráněny měkkým potahem. Hmotnost v minimalistické variantě (dva akumulátory ze čtyř, bez manipulátoru) je 10 kg. Krychle je vybavena pohonným a řídicím systémem, sensory, dotykovou obrazovkou a porty pro připojení nástavbového vybavení.
Zdroj: https://i0.wp.com
Překlad: Radim Prestsch
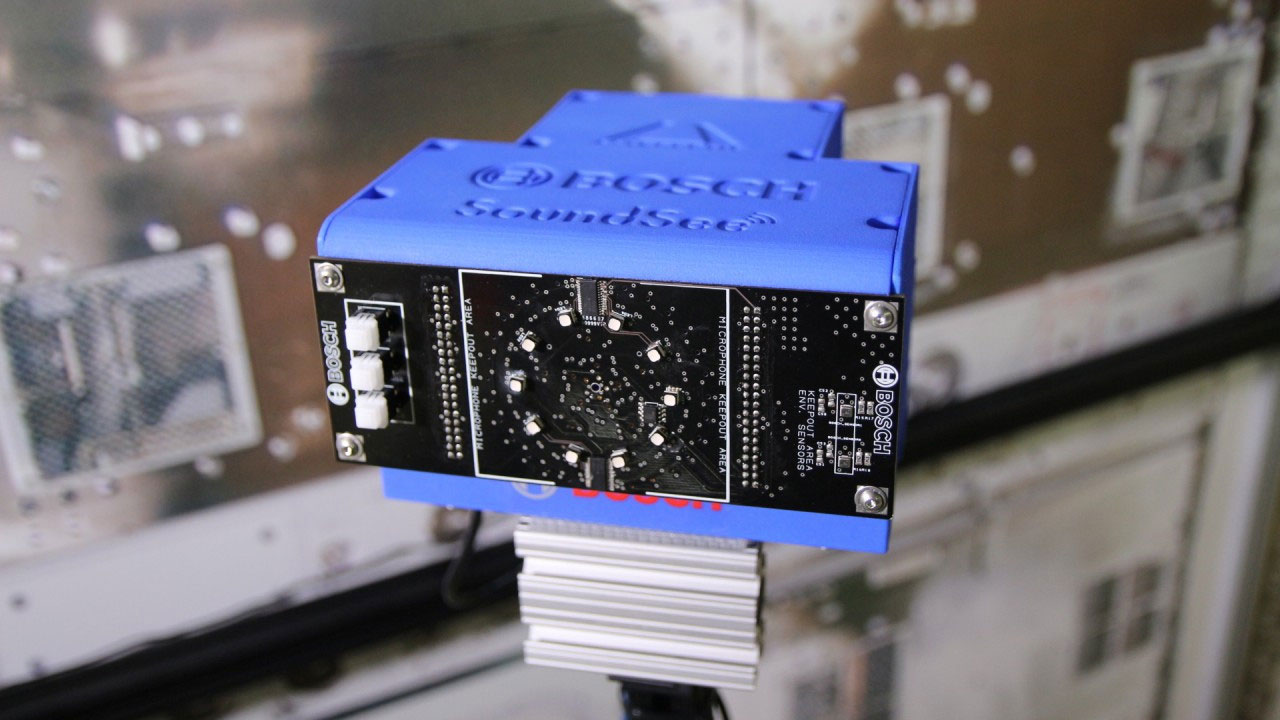
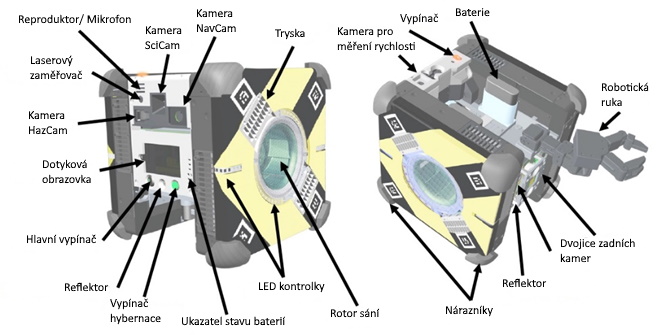
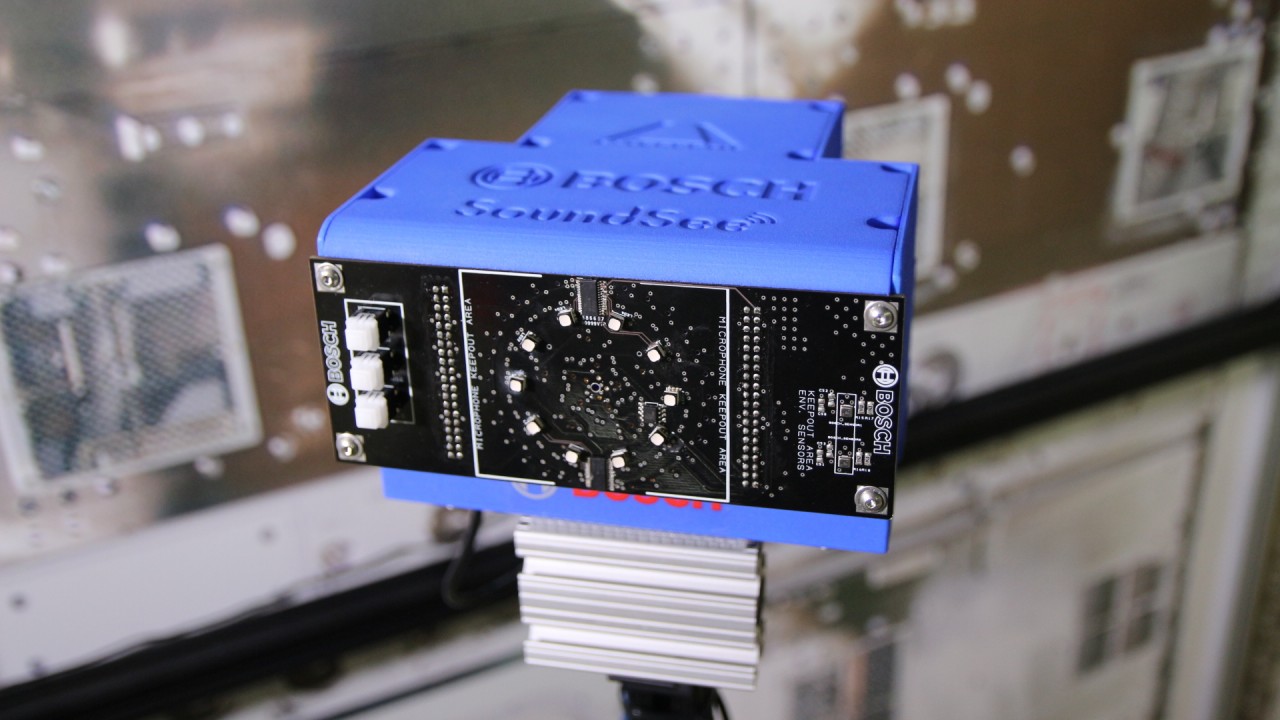
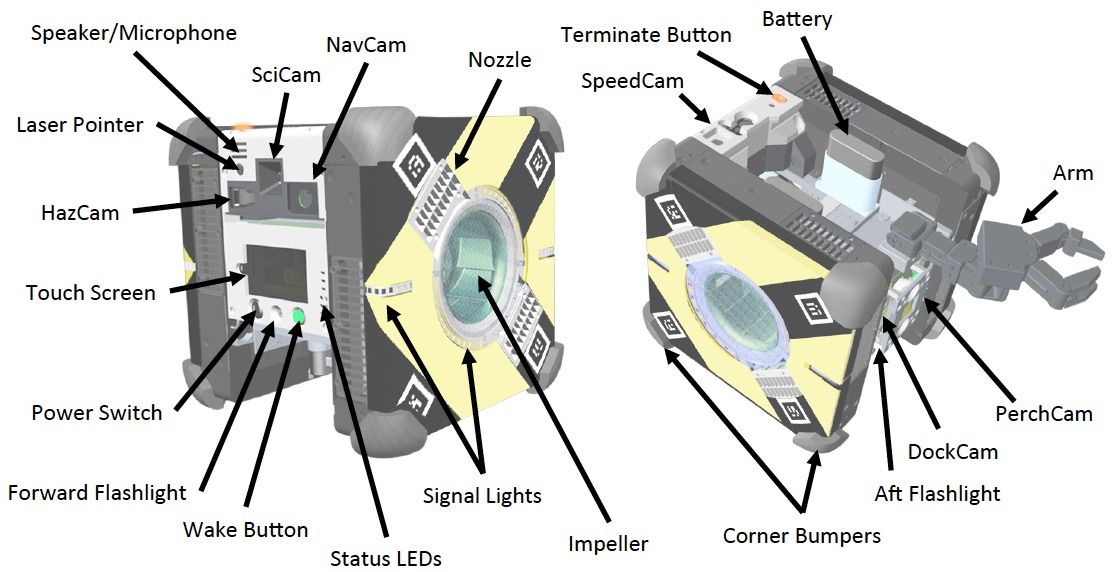
Obrazovka slouží nejen k obsluze robota, ale také ke komunikaci s posádkou. Uvítací obrazovka v klidovém režimu zobrazuje pár očí, které se „rozhlížejí“ a občas mrknou. Při pohybu se budou na obrazovce objevovat blikající šipky, indikující změnu směru letu. Kromě dotykové obrazovky využívá pro komunikaci s astronauty LED kontrolky na bocích a vlastní reproduktor. Astrobee je tak nejen vidět, ale i slyšet. Sám také může naslouchat. Společnosti Astrobotic Technology a Bosch vyvinuly modul SoundSee Microphone, který umožní analýzu standardních zvuků stanice a při jejich změně identifikuje případný problém nebo závadu. V současnosti tuto činnost pravidelně provádějí astronauti, což představuje dvě hodiny jednotvárného měření.

Zdroj: https://spectrum.ieee.org/
Na první pohled se roboti liší barvou – Bumble je modrý, Honey žlutý a Queen zelená. Na Zemi zůstaly dva další exempláře, Melissa a Killer, které poslouží při hledání a opravách případných závad, testovaní a integraci budoucích periferních zařízení.
Pohon a stabilizace
SPHERES vyžadovaly nepřetržitý dohled astronautů, mimo jiné protože byly lehce hořlavé, a byly závislé na jednorázových alkalických bateriích a zásobě CO2, který byl „palivem“ jejich pohonného systému. Astrobee má pomoci vyvinout zcela autonomní systém.
Zdroj: https://spectrum.ieee.org/
SPHERE se díky reaktivnímu pohonu mohly, přinejmenším teoreticky, pohybovat i v okolí ISS ve vakuu, byť by takové použití vyžadovalo další úpravy. Naproti tomu Astrobees jsou určeny výhradně pro práci v útrobách stanice, protože ke svému pohybu potřebují atmosféru.
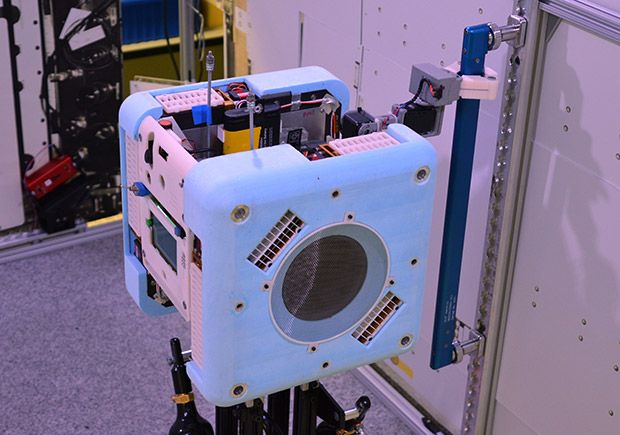
Jejich pohonný systém však nevyužívá princip pohyblivého, rotujícího křídla jak jej známe z helikoptér a dronů. Tvoří jej dva sací vstupy na bocích robota osazené dvojicí protiběžných vrtulí. Opačná rotace brání gyroskopickému efektu. Vrtule nasávají a stlačuji okolní vzduch, který je pak následně směrován do ovládané dvojice trysek na každé ze šesti stran. Těchto dvanáct trysek je zároveň uspořádáno tak, aby v případě, že by došlo k „zaseknutí“ některé z nich, robot vždy rotoval a nestal se neřízenou střelou ohrožující vše, co se mu postaví do cesty. Standardně trysky pracují v párech, což zajišťuje stabilní přímočarý pohyb nebo rotaci v libovolném směru podél kterékoliv osy.
Excentrické umístění trysek však není jedinou pojistkou. Pořád se jedná o automaty, jakkoliv vyspělé, které se v ideálním případě samy „bez dozoru“ pohybují po stanici. Všechny pohyblivé součásti jsou proto umístěny uvnitř hlavního tělesa, aby jej v případě nutnosti mohli astronauti bezpečně chytit, a všechny hrany a rohy jsou zaoblené, kryté měkkou pěnou.

Zdroj: https://www.nasa.gov/
Svými parametry je Astrobee srovnatelný s bowlingovou koulí a stav beztíže nemá žádný vliv na platnost druhého Newtonova zákona. Maximální opatrnost je tedy opravdu na místě. Zvýšená pozornost je věnována především staničním oknům. Ne že by hrozilo jejich proražení, ale každé okno se skládá za čtyř vrstev. Dvě vnitřní vrstvy jsou přetlakové a z vnější i vnitřní strany jsou vrstvy se zvýšenou odolností proti poškrábání. A právě o ochranu vnitřního z těchto skel jde v první řadě. Astrobee musí být 100% hardwarově jištěný. I v případě nejhoršího možného havarijního scénáře nesmí znamenat ohrožení stanice. Vymýšlení a testování takových situací se tak stalo důležitou součástí vývoje. Nejkritičtější situaci představují zaseknuté trysky při přímočarém letu podél nejdelší možné trasy bez překážek na ISS, což je kolem dvaceti metrů, a následný náraz do okna. Astrobee by tak zrychlil na 7,2 km/h (oproti provozním, tempomatem omezeným, 0,75 m/s). To by už sice stačilo na poškození první okenní vrstvy, ale nikoliv na porušení hermetičnosti kosmické stanice. I přesto je pro Astrobees Cupola zakázanou zónou.
Velká pozornost byla věnována také hlučnosti letících robotů, která tak nepřesahuje šum pozadí ISS. Roboti mají navíc pro svou stabilizaci na pracovním místě možnost autonomního ukotvení pomoci vlastního manipulátoru, vytištěného na 3D tiskárně, kterým se drží za madla, běžně používaná astronauty.

Zdroj: https://spectrum.ieee.org/
Rameno je standardně uloženo ve schránce v zadní části robota a pro ovládání využívá dvojici zadních kamer. Pokud tedy Astrobee „kouká“ astronautovi přes rameno, nebude jej při tom ani ofukovat ani mu bzučet do ucha. Čelisti na konci chapadla mají dostatečně silný stisk, aby stabilizovaly celé zařízení, zároveň jsou však naprogramovány, aby se uvolnily, pokud tah vyvolaný vnější silou překročí stanovenou mez. V případě potřeby tak může astronaut robota bezpečně „utrhnout“ z madla. Hlavním úkolem manipulátoru je tedy uchycení a stabilizace robota v prostoru stanice. Do budoucna se však pro něj počítá s nejrůznějším nástavci pro celou škálu dalších činností.
Připraven je také nástavec s přísavkou, která, na rozdíl od klepeta, umožní ukotvit robota na jakémkoliv povrchu.
Vybavení, sensorický systém a „mozek“
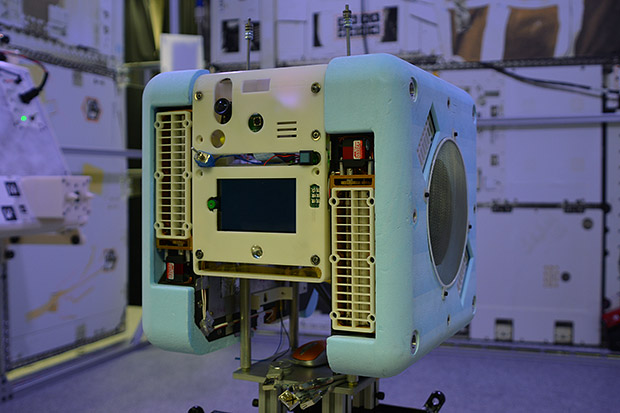
Prostor mezi pohonnými jednotkami poskytuje dostatek prostoru jak pro senzorický systém a řídící počítač robota, tak pro soubory nejrůznějšího vybavení. Spodní a horní třetinu kostky tvoří celkem čtyři sloty pro výměnné jednotky, každý vybavený konektory pro mechanické, datové a napájecí propojení. Horní přední slot je u aktuálních sestav obsazen vlastními navigačními sensory Astrobee, ale možnost připojení přídavného hardwaru je pro budoucnost prioritou. Výsledky, které v tomto směru dosáhl vývojový tým při testování programu SPHERE, vyvolaly nejen nadšení, ale především vlnu nápadů, které se budou technici snažit uplatnit u Astrobee.
Výpočetní systém Astrobee se skládá ze tří procesorů. První používá operační systém Linux a má na starosti vlastní funkce robota. Druhý, s Androidem, je rezervován pro zmiňované přídavné zařízení a testování. Oba systémy, řídící a vědecký, jsou izolovány, což zároveň zjednodušuje upgrade testovacího programu, jehož zdrojový kód je veřejně přístupný nejen profesionálním týmům, ale i softwarovým nadšencům.
Zdroj: https://spectrum.ieee.org/
Senzorický systém tvoří kamera se 116° zorným polem a HD kamera s automatickým ostřením, která dokáže v reálném čase streamovat obraz přímo do řídícího střediska. Dále je to IR3D sensor, který dokáže zachytit překážky až do vzdálenosti čtyř metrů před robotem a sensor pro měření rychlosti. Ten má rovněž bezpečnostní funkci a dokáže samostatně vypnout pohon v případě, že robot překročí nejvyšší povolenou rychlost.
Dvě další kamery sledují „provoz“ za robotem a jejich primárním úkolem je navigace při parkování v dokovací stanici. Zdrojem energie jsou Li-Ion baterie (14,4 V/ 2 A stejnosměrného proudu). Nejedná se sice o nejbezpečnější variantu akumulátorů, ale protože se nejedná o první Li-Ion baterie na palubě ISS nepředstavovalo jejich použití bezpečnostní problém, který by vyžadoval certifikaci. Provozní výdrž se pohybuje v řádu hodin v závislosti na druhu a intenzitě vykonávané činnosti, přičemž Astrobee si sám hlídá stav baterií a zajišťuje jejich dobíjení.
Autonomní navigace
Astrobee je vybaven autonomním navigačním systémem pro pohyb v západní části ISS, se zapojením ruského segmentu se nepočítá. ISS představuje kompaktní, snadno definovatelné a předvídatelné prostředí. V principu je tak autonomní navigace jednoduchá – pro určení polohy monoskopická kamera porovnává okolí robota s mapou uloženou v jeho paměti. V beztíží ztrácí pojmy podlaha a strop svůj význam, přesto je astronauti běžně používají. Vede je k tomu jak určitá mentální „gravitační“ setrvačnost, jednoduše přirozenost, tak i například osvětlení, či orientace většiny vybavení stanice. Proto se i Astrobee budou při svém pohybu primárně orientovat podle stropu. Prostě proto, aby je někdo nezašlápl nebo neodkopl. V první fázi totiž Astrobee dokáže, v případě že zachytí překážku, třeba plujícího astronauta, pouze zastavit ale ne se vyhnout nebo jej obletět. Tyto pokročilé dovednosti se naučí později.
Autonomní navigace je jedním ze tří navigačních módů, ve kterých mohou roboti pracovat. K dispozici je také přednastavení pohybu, či dálkové řízení ze Země. Modulární konstrukce pak umožní snadnou modernizaci či doplnění stávajícího vybavení.
Dokovací stanice

Zdroj: https://spectrum.ieee.org/
Dokovací stanice umístěná v modulu KIBO je „bezpečným přístavem“ těchto pilných hvězdných včelek. Je napojena na staniční napájecí a telemetrickou síť. Obsahuje dvě kotevní místa s elektromagnety, které se aktivují v momentě bezprostředního přiblížení přistávajícího robota a vypnou v okamžiku, kdy robot vyráží na další misi.
Přes tento port je také aktualizován stávající a nahráván nový software.
Třetí z robotů je tak do jisté míry záložní a standardně se bude využívat jen v případě testů činností prováděných ve trojici.
Zdroj: https://media-ecn.s3.amazonaws.com/
Práce s roboty SPHERE vyžadovala nemálo času na jejich přípravu k jednotlivým testům počínaje jejich vybalením, nabitím baterií, naplnění nádrží s CO2 a konče jejich uskladněním po skončení experimentu. A to vše kladlo nemalé požadavky na drahý čas astronautů. Dokovací stanice Astrobee vyloučila astronauty z těchto neproduktivních činností, které tato generace robotů zvládne sama, případně s pomocí pozemního střediska. Roboti totiž při poklesu nabití baterie pod stanovenou mez, která je definovaná aktuální polohou robota a vzdáleností od dokovací stanice, sami doletí do modulu KIBO, zaparkují a baterie si dobijí.
Zdroj: https://www.nasa.gov/
Prvním krokem po vybalení každého robota byla zevrubná i podrobná kontrola systémů a zejména jejich kalibrace v novém prostředí nulové gravitace. Po jejím úspěšném absolvování převzal od McCainové dohled na Bumble kanadský astronaut David Saint-Jacques. Prvním testovaným manévrem byl autonomní start z a návrat zpět do dokovací stanice. V průběhu dálkově řízeného letu přitom Bumble skenoval prostor Kibo a získaná data porovnával s mapou uloženou v jeho vlastní databázi.
Ostrý provoz, v rámci kterého Astrobee nahradí svého předchůdce SPHERE, začne v roce 2020. Avšak již 14. června skončilo úvodní testování Bumble a ten tak mohl poprvé opustit „úl“ a vydat se na první sólo let po stanici.
Na robotickou civilizaci a její hemžení prostorami kosmických lodí a stanic, jak je známe například z úvodu zmíněných Star Wars, si musíme ještě pár let počkat. Každá cesta však začíná prvním krokem a Astrobee je důkazem, že jsme nejen vykročili, ale už jsme na cestě.

Zdroj: https://spectrum.ieee.org/
Zdroje informací:
www.nasa.gov
https://spectrum.ieee.org/
https://www.businesswire.com/
Zdroje obrázků
https://www.nasa.gov/sites/default/files/thumbnails/image/astrobee.png
https://www.nasa.gov/sites/default/files/thumbnails/image/picture1_5.png
https://spectrum.ieee.org/image/Mjg2MzMwMA.jpeg
https://www.nasa.gov/…/default/files/thumbnails/image/anne_mcclain_astrobee.png
https://techcrunch.com/…/uploads/2019/10/Bosch-SoundSee.jpg?w=1390&crop=1
https://spectrum.ieee.org/image/MzI3Njg3OQ.jpeg
https://spectrum.ieee.org/image/MzI3Njg3OA.jpeg
https://spectrum.ieee.org/image/Mjg2MzMyOA.jpeg
https://www.nasa.gov/sites/default/files/thumbnails/image/jsc2019e001081_alt.jpg
https://spectrum.ieee.org/image/Mjg2MzMyNQ.jpeg
https://spectrum.ieee.org/image/Mjg2MzMyNw.jpeg
https://media-ecn.s3.amazonaws.com/embedded_image/2019/05/1041×320.gif
https://spectrum.ieee.org/image/Mjg2MzMyNg.jpeg
https://www.nasa.gov/…/image/arc-astrobee-firstflight-stjacques-05.jpg
https://spectrum.ieee.org/image/MzI3Njg2OQ.jpeg







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Astroterminator-2
Jsou to takoví macci, budí trochu hrůzu – v tom smyslu, jak je psáno ve článku, tj. velká hmota, pokud se stane neřiditelnou, tak ji kosmonaut v podstatě nemůže chytit někde poblíž osy těžiště. Když už to nemůže být mnohem menší, tak by to mělo vypadat třeba jako robotický vysavač, který je tak placatý, že se dá jednou rukou chytit a zvednout.
Roboti mají HW i SW pojistky, prošli přísnými testy. Ale je pravda, že nej-nejčernější (tedy snad nepravděpodobný) scénář – rána rozfofrovanýn, plně osazeným (15-20kg) robotem do hlavy – by způdobil vrásky na čele.
Za pár let budou na Zemi jezdit autonomní auta a autonomní roboti nám už taky nejspíš přijdou jako přirozená součást všedního dne.
Dění na ISS mě obvykle příliš neuchvacuje, ale tohle je výjimka. Naprosto fascinující.
Těší mě, že jsme v redakci trefili téma, která Vás zaujalo.
Tak to mě ISS fascinuje, ale toto se přímo vymyká. Opravdu skvělý a nápaditý článek. Povedl se, díky
Musím říct, že je to bomba. Experimenty a různá měření dostanou na ISS další rozměr , jakmile nebude ke všemu potřeba lidská ruka. Efektivita a přínos se mohou i násobit.
Nádhera 🙂
Díky za pěkně napsaný, srozumitelný článek.
Nicméně moc nechápu, proč v rámci nejnákladnějšího vědeckého projektu lidstva ztrácejí čas testování polofunkčních prototypů „hraček“. Kdyby to byl v bazénech a v mořích potápěči dlouhodobě testovaný a prověřený hotový stroj, chápal bych to. I kdyby astronautům jen podával šroubovák a kladivo a utíral orosené čelo.
Ale takhle mi to přijde jako šílené plýtvání na úkor základního výzkumu.
Beztíže je hodně specifické prostředí, které se na Zemi nasimulovat nedá. Proto se musí testovat na ISS. Připomínám Robonauta, který zaostal za očekáváním.
Jedná se ale o druhou generaci, snad se je tedy opravdu podaří zapojit do provozu tak, aby to posádka reálně pocítila a nezůstane jen u testování.
Stav beztíže se opravdu na Zemi pořádně simulovat nedá. Ale pohyb v něm přece není ten zásadní problém. To zvládne jakákoli kosmická loď, dokonce i v automatickém režimu. Problém je autonomní rozpoznávání objektů, a reakce na ně. A to lze testovat klidně v tom bazénu. Až bude existovat robot, který samostatně donese potápěči zapomenutý imbus desítku, pak bude čas přidělat mu odpovídající pohon, změnit v programu hustotu a viskozitu prostředí a poslat ho na ISS.
Do té doby bych mnohem radši viděl aspoň to pěstování proteinových krystalů, když už ne pořádnou odstředivku a svařování velkých konstrukcí.