V pondělí 18. listopadu se italský astronaut Luca Parmitano pustil do ovládání pojízdného robota umístěného v Nizozemí, bezchybně jej provedl přes překážky a odebral s ním vzorky. To vše zvládl v době, kdy obíhal kolem Země rychlostí přes 28 000 km/h na palubě ISS. Šlo sice o první ze sérií zkoušek ovládání vozítek z oběžné dráhy, ale už v roce 2015 Dán Andreas Mogensen ovládal z ISS pozemskou robotickou paži, ale nyní byl program mnohem komplexnější. Aktuální experiment Analog-1 dopadl na výbornou – Luca měl na všechny činnosti vyhrazenou hodinu, ale nakonec je zvládl jen za půl hodiny.
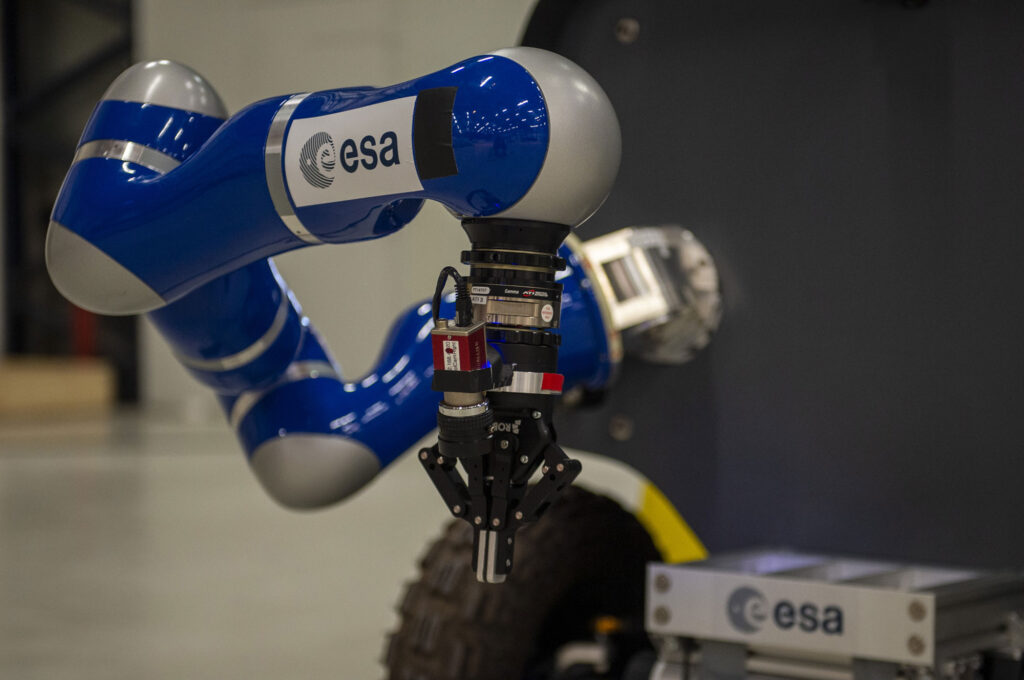
„Vyvíjíme systémy, ve kterých astronauti spolupracují s roboty, aby zvládli víc, než co mohou udělat sami,“ říká Kjetil Wormnes, projektový manažer z ESA a dodává: „Vozítku na Marsu by trvalo týdny než by udělalo to, co Luca v rámci Analog-1 zvládl za půl hodiny.“ Roboti mohou plnit zvláštní úkoly, nebo být vysláni tam, kam lidé nemohou, ale nic nenahradí náš bystrý úsudek a schopnost improvizace, které jsou vlastní lidem. Rover pro Analog-1 byl vybaven zpětnou vazbou, takže Parmitano mohl cítit to, co cítí jeho robotický parťák. Na základě toho pak přizpůsobil svou práci s joystickem, který umožňoval šest stupňů volnosti.

Zdroj: https://www.esa.int/
Strategie ESA počítá s tím, že by astronauti jednou ovládali podobné roboty z oběžné dráhy Měsíce či Marsu, nebo z útrob povrchové základny. „I na Měsíci by trvalo několik hodin než se astronaut oblékne do skafandru a připraví v přechodové komoře na nějaký úkol,“ přidává Jessica Grenouilleau, vedoucí projektu Meteron v rámci Exploration Systems Group pod křídly ESA a dodává: „Když dáme astronautům možnost řídit nedaleké roboty z bezpečí a pohodlí základny či kosmické stanice, mohou zvládnout hodně práce. První zkouška ukázala skvělé adaptování posádky na robotický systém, což zlepšilo vzájemnou spolupráci na mnoha úkolech.“
V pondělí 25. listopadu bude experiment pokračovat a tentokrát se do něj zapojí všechny prvky programu Meteron. Luca navede robota umístěného v Nizozemí na tři různá místa v testovacím areálu a ve spolupráci s vědeckým týmem ve Středisku evropských astronautů v Kolíně nad Rýnem rozhodnou, které kameny budou odebrány. „Jde o autentickou možnost využití ISS jakožto ekvivalentu stanice Gateway – testovací areál odpovídá lunárnímu povrchu. První test jen vyzkoušel systémy a Luca postupoval po vymezené trase. Příště ale bude mít větší volnost výzkumu, aby splnil úkoly stanovené vědeckým týmem.“ Stejný software navržený pro navigování roveru Rosalind Franklin v rámci programu ExoMars umožní vědeckému týmu vyznačit body zájmu, ale také nebezpečná místa, která jsou mimo možnosti vozítka. Experiment začne v 11:00 SEČ a můžete jej sledovat na Twitteru @esaspaceflight.
Přeloženo z:
https://www.esa.int/
Zdroje obrázků:
https://www.esa.int/…/21471466-2-eng-GB/Analog-1_sample_collection_tool.jpg
https://www.esa.int/…/European_Astronaut_Centre_control_room_during_Analog-1.jpg




{kind=link}
{kind=link}
Dík za info to je zajímavé.
Já chci takovou hračku na dálkové ovládání také 🙂
Take dekuji 🙂
Jsem rád, že měl článek úspěch. 😉
V každém „hračkářství pro velké kluky“ najdete mnohem zábavnější hračky. 🙂
Ano. To je přesně ono. Mnoho let budou lidé létat na oběžnou dráhu Marsu, aby odtud ovládali roboty na jeho povrchu, ale nebudou mít žádný důvod ztrácet obrovské množství energie samotným přistáním a nutným startem při návratu zpět na Zemi. Vykonají na Marsu mnoho práce, ale jejich noha se povrchu Marsu nedotkne.
To je pro mě dost podivná představa. Už teď je všude kolem nás plno polo/úplně automatických strojů. Strávit několik let v kosmické lodi ve vesmíru jen kvůli „on-line“ řízení robotů mi připadá šíleně nákladné a riskantní. Za cenu té lodi s lidmi tam můžete poslat desetkrát víc autonomních robotů. A když se nějaký rozbije, tak se rozbije. A příště se pošle lepších deset.
Ne. Jde o to okamžité ovládání strojů na povrchu bez šíleného zpoždění a přitom s výhodou, že není nutné mít tolik paliva na návrat zpět na Zemi, protože stále letíte Marsovskou první kosmickou rychlostí.
Já to chápu. 🙂
Jen mi to přijde jako zbytečně drahé a riskantní tam lítat jen kvůli eliminaci zpoždění, když už dnes existují velmi dobré autonomní stroje. A co teprve za pár let.
Bylo by dost absurdní, kdyby astronaut před odletem doma naprogramoval robotickou sekačku a vysavač, odjel na kosmodrom v autonomním taxíku, aby pak mohl po mnohaměsíční cestě na oběžné dráze Marsu ručně ovládat nějaké roboty na povrchu.
Vše je jen otázka nákladů a rizik. Poměru výhod a nevýhod.
„velmi dobré autonomní stroje“
Myslíte ty, které ještě ani pořádně neumějí vyvrtat obyčejnou díru?
„Myslíte ty, které ještě ani pořádně neumějí vyvrtat obyčejnou díru?“
Nevím co máte na mysli. Robotů, kteří samostatně vrtají díry je na Zemi spousta. Jestli myslíte rozpadlou vrtačku na Curiosity, tak to je spíš mechanický problém.
Skutočná budúcnosť planetárneho výskumu slnečnej sústavy. Bude stačiť zadať súradnice cieľového miesta, umelá inteligencia na vozítku sa premiestni a vykoná všetko čo mu zadáme, Všetko sa vykoná plne autonomne. Ľudská prítomnosť v 98% prípadoch bude zbytočná. Nie je to moc romantická predstava , ale je to nutné reálne a celkom určito to tak bude. A bude to aj nezrovnateľne lacnejšie, ušetrí to aspoň 98% nákladov.