
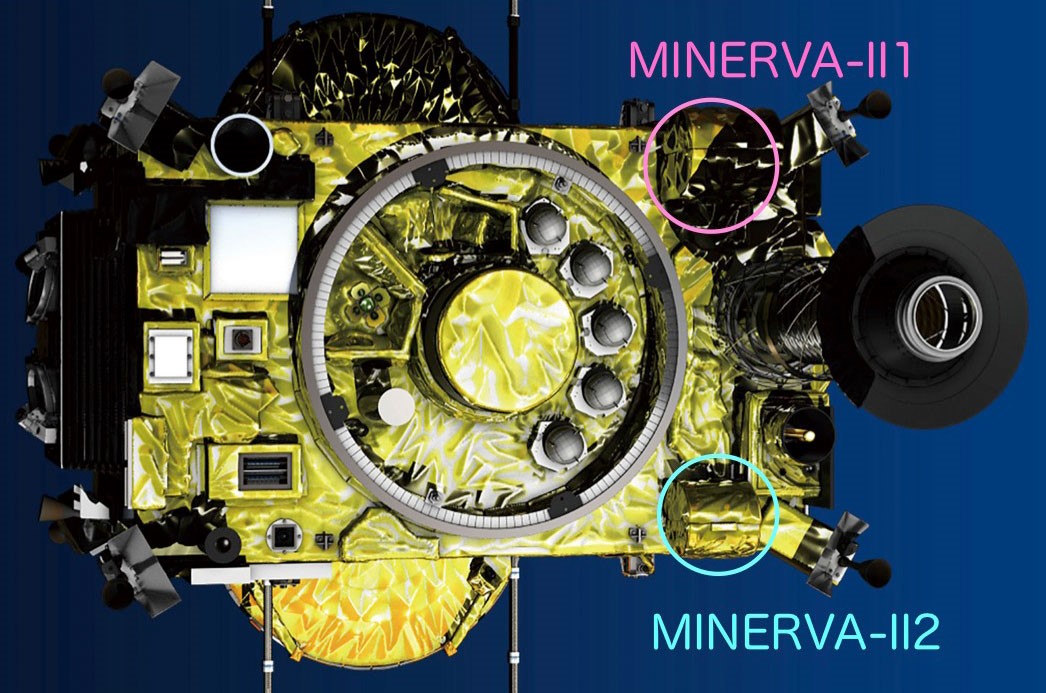
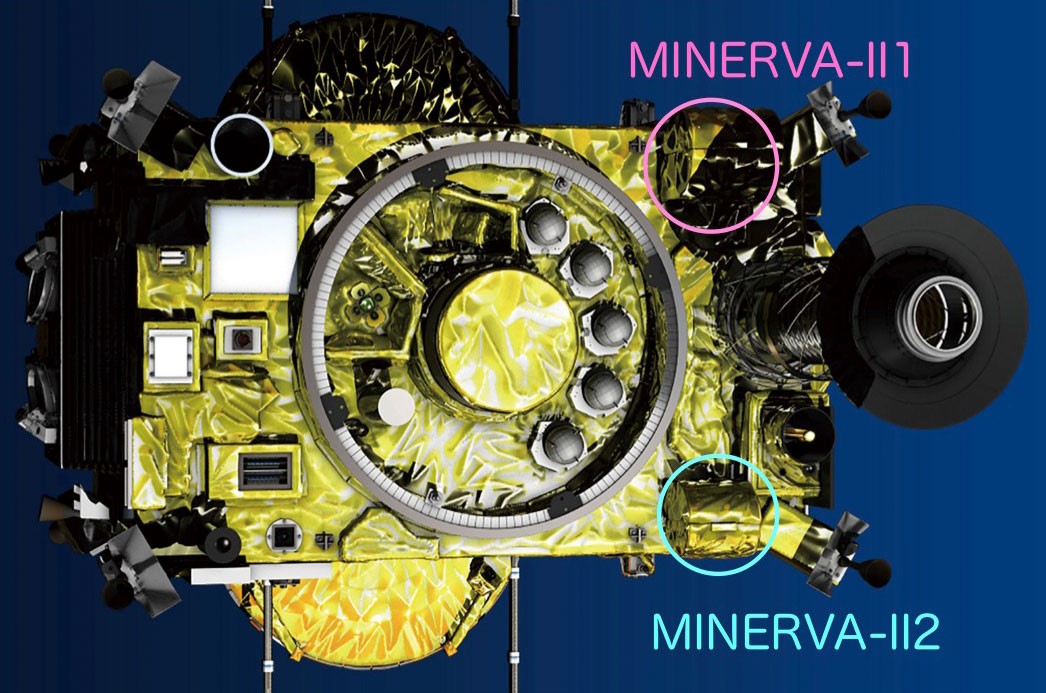
Mise japonské sondy Hayabusa 2 se blíží k prvnímu významnému milníku. Už zítra by totiž mělo dojít k vysazení dvojice roverů. Roboti MINERVA-II (MIcro Nano Experimental Robot Vehicle for Asteroid, druhá generace) jsou nástupci pohyblivého modulu MINERVA, který k asteroidu Itokawa nesla první Hayabusa. Na spodní straně Hayabusy 2 najdeme dva kontejnery – MINERVA-II1 a MINERVA-II2. Zatímco v kontejneru MINERVA-II1 se nachází dva rovery, které mají být vysazeny zítra, uvnitř kontejneru MINERVA-II2 bychom našli jediný pohyblivý modul – ten má být vysazen příští rok.
Zdroj: http://www.hayabusa2.jaxa.jp/
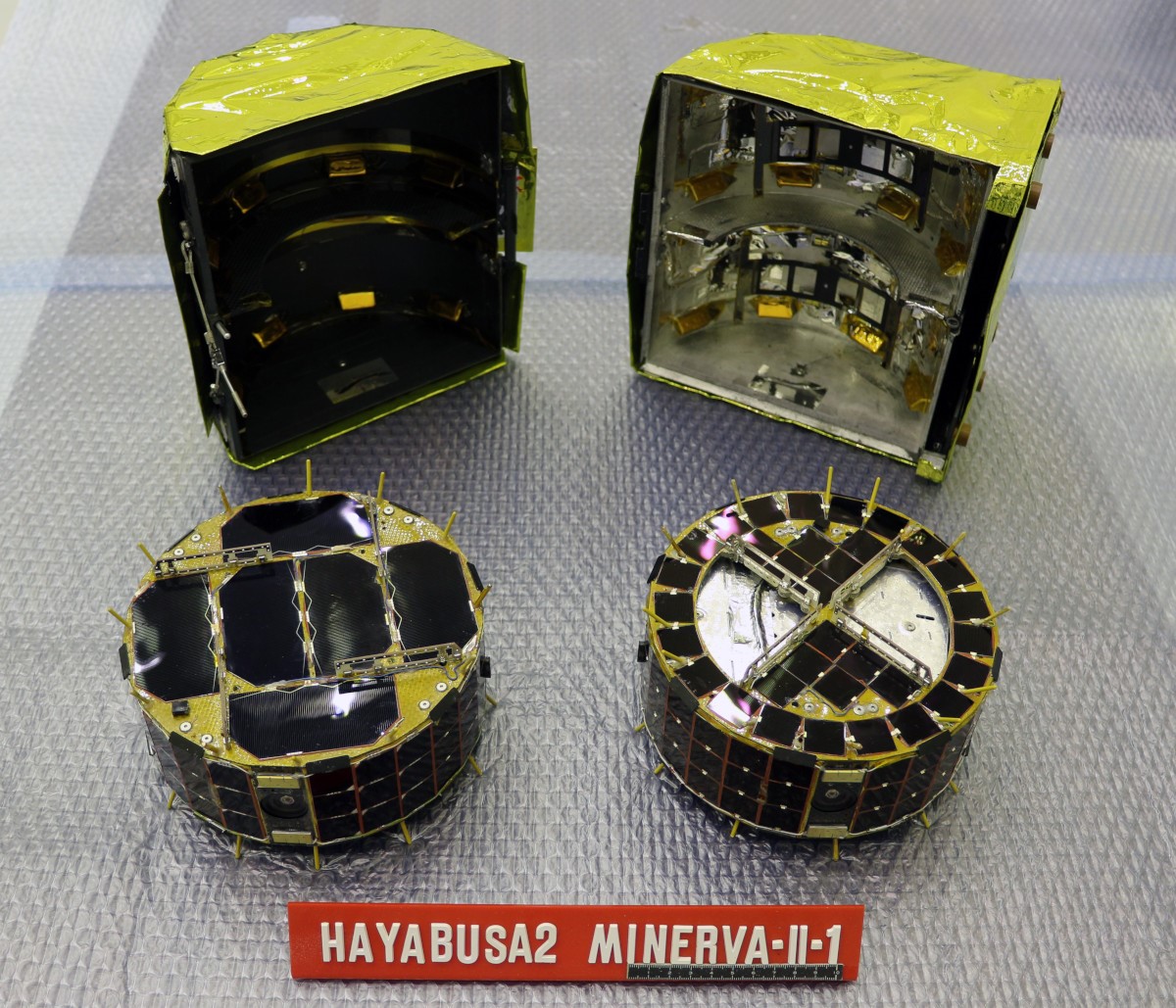
Dva rovery uvnitř kontejneru MINERVA-II1 mají neosobní označení Rover-1A a Rover-1B. Jejich tvar je válcovitý s průměrem 18 centimetrů a výškou 7 centimetrů. Každý z robotů váží cca. 1100 gramů. O jejich vývoj se postaral Institut vesmírných a astronautických věd při agentuře JAXA ve spolupráci s japonskými firmami a univerzitami.
Na Roveru-1A najdeme celkem čtyři kamery a Rover-1B disponuje trojicí těchto elektronických očí. Kosmická agentura by ráda využila záběry z těchto kamer k vytvoření stereoskopických fotek přímo z povrchu. Z okrajů roveru trčí teplotní senzory, které mohou připomínat rohy a jejich úkolem je změřit teploty na povrchu Ryugu. Malé rovery kromě toho obsahují také optické senzory, akcelerometr a gyroskop.

Zdroj: http://www.hayabusa2.jaxa.jp/
Rovery budou s mateřskou sondou komunikovat prostřednictvím opakovače (OME-E) na Hayabuse-2, přičemž maximální rychlost přenosu dat je 32 kbps. Teprve z mateřské sondy se budou údaje odesílat na Zemi. Systém OME-E bude využit i pro komunikaci s francouzsko-německým landerem MASCOT, jehož vysazení by mělo proběhnout v říjnu letošního roku.
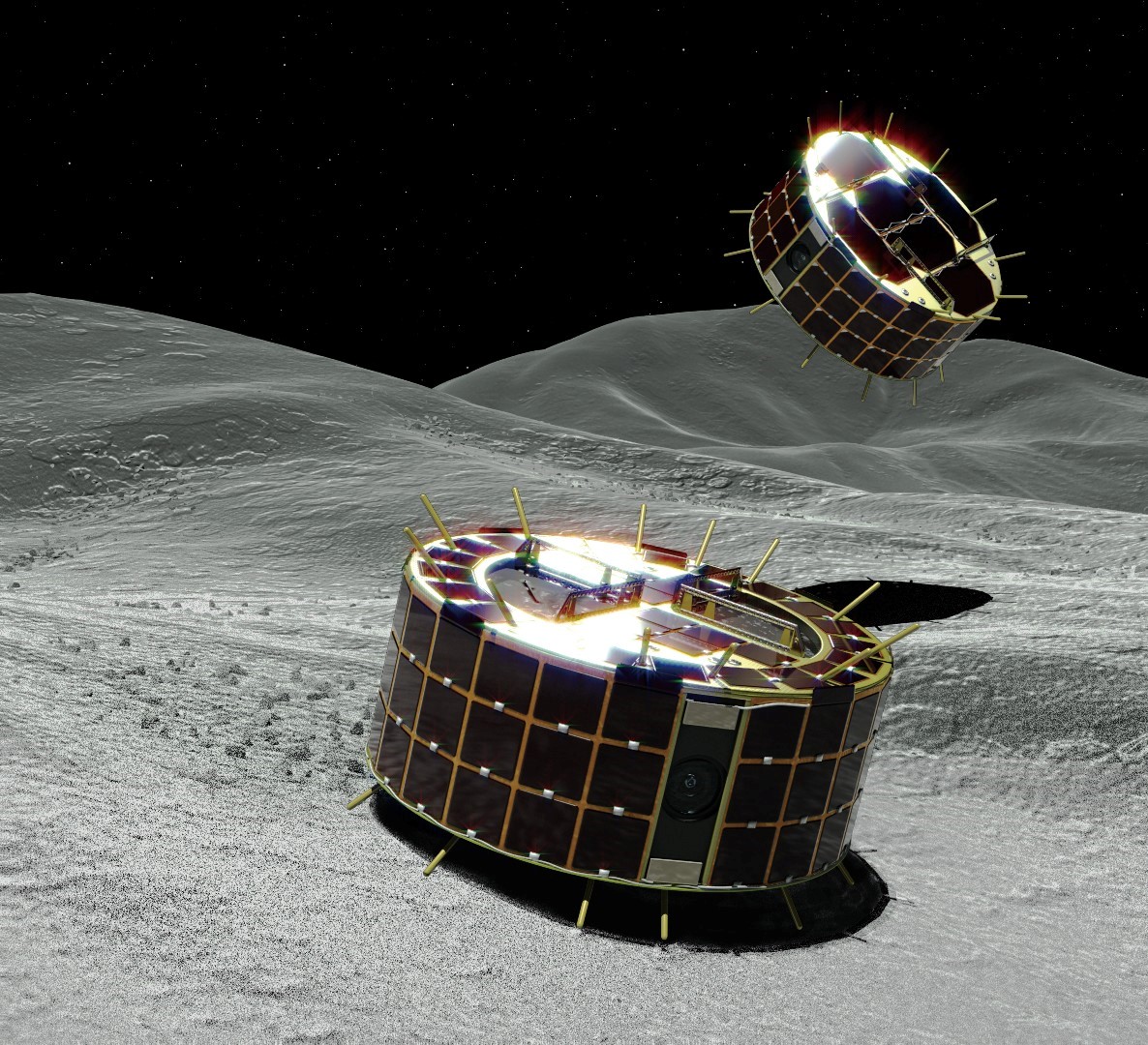
Ale zpět k roverům v kontejneru MINVERVA-II1. Jejich hlavní schopností je pohyb po povrchu asteroidu. Výraz rover sice evokuje pohyb pomocí kol, ale tito průzkumníci budou spíše poskakovat. Uvnitř jejich těla je motor, který se otáčí a umí způsobit, že rover poskočí během otočky. Díky tomu by oba výsadkové moduly měly mít možnost prozkoumat hned několik lokalit na povrchu asteroidu. Zajímavé je i to, že tyto dva rovery by se měly pohybovat autonomně a samy určovat, co by se mělo zkoumat.

Zdroj: http://www.hayabusa2.jaxa.jp
Nezvyklý způsob pohybu je dán extrémně nízkou přitažlivostí asteroidu Ryugu. Klasické vozítko by zde nemělo šanci – při prvním pokusu o pohyb by se začalo vzdalovat od povrchu. Oproti tomu poskakovací mechanismus nabízí mnohem lepší řešení. Ostatně o nízké přitažlivosti svědčí i to, že při každém poskoku by se měl rover přemístit o 15 metrů na povrchu asteroidu, přičemž „ve vzduchu“ stráví při svém skoku celých 15 minut. O výsledku výsadku Vás budeme samozřejmě informovat.
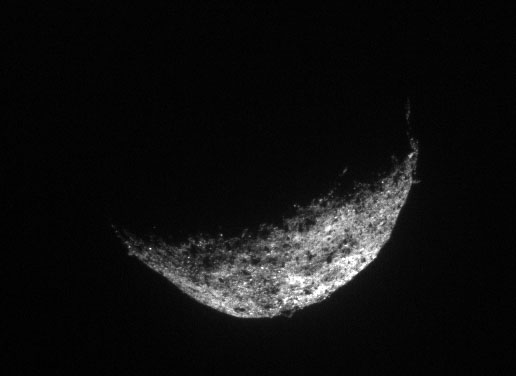
Hayabusa 2 zahájila sestup již dnes v 7:08 SELČ a k povrchu se blíží rychlostí 40 cm/s. Pokud máte zájem, můžete na této stránce sledovat aktualizované nejnovější snímky přímo z průběhu sestupu. Stránku musíte ručně aktualizovat, na fotkách je jižní pól nahoře a pokud chcete znát čas pořízení, musíte k uvedenému času (UTC) přičíst dvě hodiny. Pak získáte údaj ve středoevropském letním čase.
Zdroje informací:
http://www.hayabusa2.jaxa.jp/en/topics/20180919e/
Zdroje obrázků:
https://d1o50x50snmhul.cloudfront.net/wp-content/uploads/2018/06/22114500/hayabusa-2.jpg
http://www.hayabusa2.jaxa.jp/en/topics/20180919e/img/fig1.jpg
http://www.hayabusa2.jaxa.jp/en/topics/20180919e/img/fig2.jpg
http://www.hayabusa2.jaxa.jp/en/topics/20180919e/img/fig3.jpg

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Ty landery jsou geniálně vymyšlené.
To ano, zvlášť když si člověk uvědomí jejich rozměry.
O rozmery by som sa ani nebal. Priemer 18 cm a vyska 7 cm dava pomerne dost vela priestoru. Bude to asi nieco ako mensia plechova konzerva od lazenskych oplatok.
Ale ten mechanizmus pohybu, to je fakt nieco. Som zvedavy, ako im to bude fungovat a drzim palce. Toto je nieco, co sa muselo testovat fakt fest blbo. Nadlahcenie vodou v gravitacii zeme asi v tomto pripade nemohlo fungovat, pretoze relativne velky odpor vody voci pohybu by skreslil vysledky.
V tej slabej gravitacii to asi ani nebude velky motor. Mozno nieco ako prerasteny vibracny motorcek z mobilneho telefonu.
Testovalo sa to v lietadle Zero G (teda aspoň v takom type).
Podle toho PDF, kde se popisuje princip pohybu roverů se píše, že to testovali v (jak to správně nazvat česky?) „drop tower“. V podstatě je to na způsob Galileiho pouštění předmětů z věže v Pise. (samozřejmě nevylučuji nějakou to zvracecí kometu)
Sakra, ten český ekvivalent jsem znal…
Díky za připomenutí podle mě málo známých faktů o těchto zajímavých modulech. Už se moc těším na snímky přímo z povrchu. Vlastně to bude první povrchový průzkum asteroidu vůbec. Snad budou MINERVy při pohybu opatrné, Philae to měl při prvním odrazu opravdu o chlup a málem odletěl na heliocentrickou dráhu. A to je 67P ještě přibližně dvojnásobně velká proti Ryugu.
Poskakování jako způsob pohybu už otestovalo Philae. Nicméně, 15 minut ve skoku při 8hodinové rotaci a 1km asteroidu dává asi 30m. Nicméně, kolik úhlové rychlosti, postrčení, si odnese skokan sebou?
Samozřejmě, že při kolmém odskokuna směr rotace si s sebou vezme stejnou úhlovou rychlost rotace jako povrch, jinak si vezme úhlovou rychlost větší nebo menší dle odklonu ve směru nebo proti směru rotace.
Podrobnější popis průběhu manévru, včetně časového plánu…
http://www.hayabusa2.jaxa.jp/en/topics/20180920e/
Není video jak se pohybují ? Diky
Takové video jsem zatím nikde neviděl.
A neexistuje nějaké podobné abych si dovedl představit ten pohyb?
Není to úplně video, ale dokument s obrázky, jak to funguje + jsou tam fotky z videa, kdy se testoval ten pohyb – tak aspoň pro představu – https://pdfs.semanticscholar.org/9495/4d807e7fa94897a36cb0a9af6112f16ed417.pdf
Tady je pak video toho principu, jak to funguje – sice to není Minerva, ale princip je stejný – https://www.youtube.com/watch?v=wcRa09IRDPo
Diiiiiiky moc !!!!!!
Sleduji ten sestup a je to opravdu nádhera, postupně rostou detaily a teď je již vidět stín sondy na povrchu. Předpokládám že po vypuštění landerů a vzdalování sondy budou pěkné snímky landerů na povrchu. No a už se těším na snímky z těch „krabic od lázeňských oplatek“. Tahle mise je opravdu povedená.
Tak už se vzdaluje, žádné landery nevidím. Ale s tím stínem sondy je to zvláštní, byl v místě „odlesku“ slunce, které ale není úplně proti sondě – neumím si představit, jaké uspořádání Slunce – sonda – Ryugu by vedlo k takové poloze stínu…?
On to není odlesk, ale tzv. opoziční efekt.
https://www.google.cz/search?q=opposition+effect&oq=opposition+effect
Projevuje se na každém hrubozrnném materiálu, dokonce i na vzrostlém poli. Princip (zjednodušeně) spočívá v tom, že když se na povrch díváme ze směru osvětlení, tak nevidíme vržené ani vlastní stíny nerovností, protože ty jsou schované za nerovnostmi samotnými. Povrch se tedy při tomto pohledu jeví mnohem světlejší než okolí (kde vlastní i vržené stíny vidíme).
Směr osvětlení nemusí být kolmý k povrchu, tento jev se projeví při libovolném úhlu osvětlení.
Vzhledem k tomu, že ten efekt je nejsilnější ve směru osvětlení, tak náš stín (případně stín naší hlavy) musí ležet uprostřed tohoto jevu.
Díky za vysvětlení, říkal jsem si, že něco jako odrážečový/odrazkový efekt by tomu odpovídalo, ale netušil jsem, že to takto opravdu funguje.
Tak to vypadá na úspěšný touchdown, nějaká ta komunikace snad také proběhla a pokud se potvrdí úspěšnost, tak Rover 1A i 1B dostanou svá jména. Na to se těším. Japonci jsou v tomto velmi kreativní a určitě zase vytáhnou nějakou mytologii 🙂
Hlavně ať je to nějaké jméno, které se již nepoužívá v nějakých jejich komiksech. Člověk pak hledá fotky a Google images mu vyhodí tunu kreslených postaviček. 🙂
Jojo. To se stává 🙂 Podobně jako třeba u té čínské trojice k Měsíci. Ale je to pěkný zvyk.
Píše se to česky Hajabusa
Myslím, že není důvod počešťovat originální jméno japonské sondy.
Výraz Hajabusa je asi převažující v české literatuře. Čeština má totiž pro čínštinu i japonštinu již cca 100 let velmi zdařilou transkripci. Ale na tomhle Japonském zázraku to nic nemění, že. Je to fakt napínavé a… úžasné!!