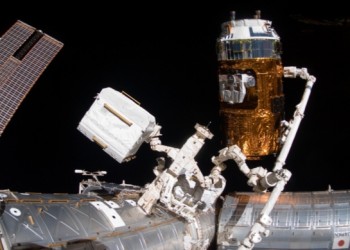
Robot Special Purpose Dexterous Manipulator (SPDM), který je častěji nazýván Dextre dokončil na ISS sérii testů, při kterých demonstroval práce, které normálně musí vykonávat astronauti při vesmírných vycházkách. Dextre je specializovaný robot, který může být přenášen mezi různými pracovišti pomocí větší robotické paže Canadarm2. Sám disponuje sadou různých nástrojů, které mu umožňují vykonávat údržbářské práce na exteriéru ISS. Na stanici byl vynesen už v roce 2008 raketoplánem Endeavour při misi STS-123 a následně sestaven během vesmírné vycházky. Po překonání několika počátečních problémů se konečně v roce 2010 dostal do plného provozu.
Prvním velkým úspěchem tohoto robota bylo vykládání nehermetizovaného nákladu z japonské lodi HTV-2, kdy asistoval Canadarm2. V roce 2012 pak začal pracovat na testech v rámci mise robotického tankování (Robotic Refuelling Mission – RRM), která má demonstrovat technologie pro opravy a tankování vysloužilých satelitů. Dextre byl také použit pro vykládání nákladu z trunku Dragonu a to při misích CRS-2, CRS-3 a CRS-5. Robot dále zvládá různé kontroly, nedávno například pomohl prověřit podivnou skvrnu na paži Canadarm2. Hlavním úkolem tohoto robota je ale vykonávat opravy, které by jinak museli provádět astronauti během vesmírných vycházek.

Zdroj: pbs.twimg.com
Tyto schopnosti měl Dextre demonstrovat během posledního testu, který se jmenoval „Main Bus Switching Unit Demonstration“. Měl ověřit schopnost robota přesunovat baterie ve standardu ORU (Orbital Replacement Units) předtím, než dorazí japonská zásobovací loď HTV-6, která na ISS nové baterie doručí. Pokud by Dextre tuto operaci zvládl sám, mohl by být zredukován počet nutných vesmírných vycházek z původně plánovaných šesti na pouhé dvě.
Orbital Repacement Units (ORU) jsou různé přístroje, pumpy, nádrže, antény a baterie, které mohou být relativně rychle nahrazeny, pokud selžou. Náhradní kusy jsou většinou skladovány na třech externích plošinách (External Stowage Platforms) a na čtyřech plošinách ExPRESS Logistics Carrier (ELC), které jsou umístěny na hlavním příhradovém nosníku. K těmto plošinám jsou připevněny pomocí rozhraní FRAM (Flight Releasable Attachment Mechanisms).
Prvním úkolem během třídenní operace, bylo přesunutí náhradního kusu MBSU (Main Bus Switching Unit) z plošiny ELC-2, na malou skladovací plošinu EOTP, která je součástí robota Dextre a vejdou se na ní až dvě ORU. Během tohoto úkonu byly na obou pažích robota Dextre připevněny koncovky OTCM, které obsahují kromě světel a kamery také čelisti pro uchopení objektů, senzory síly a pohybu a vysouvací nástrčnou hlavici, ve které mohou být použity různé nástroje. OTCM také obsahují konektor, kterým se mohou propojit s drženým objektem a zajistit přenos elektrické energie a dat. Dále asistovalo zařízení Robotic Offset Tool (ROST), které dovoluje robotické paži dosáhnout na těžko přístupná místa.

Zdroj: cbsnews.com
Během práce měl Dextre pomocí OCTM chytit zařízení ROST a použít ho pro další úkony. To se bohužel nepodařilo, čelisti OCTM byly pouhých 0,1 milimetru od požadované pozice a ani několik opakovaných pokusů o chycení nebylo úspěšných. Práce s ROST tedy byla zrušena a Dextre pokračoval dál jen za použití OCTM. Zařízení ROST bude v budoucnosti potřebné pro plánované výměny baterií, až dorazí loď HTV-6. Do té doby se pracovníci pokusí vyřešit tento problém a pravděpodobně naplánují další cvičnou operaci, při které funkčnost zařízení prověří před ostrým nasazením.
Druhý den bylo v plánu oddělit jednotku MBSU od rozhraní FRAM. Ta měla být uložena také na plošinu EOTP. První drobné komplikace se objevily, když se robot pokoušel vytáhnout MBSU. Jednotka byla chvíli zaseklá na místě a síla, kterou robot tahal, se pomalu zvyšovala. Po chvíli ale jednotka povolila, aniž by byly přesaženy limity na síly působící na robota. Během přesunování MBSU na EOTP si technici všimli, že se jim rozchází předpokládaná vztažná soustava s tou skutečnou. Řídící tým byl schopný rychle vytvořit novou vztažnou soustavu a přesun mohl pokračovat.
I přes tyto komplikace se nakonec podařilo třetí den přesunout MBSU a FRAM zpátky na plošinu ELC-2, čímž byla demonstrace ukončena. Celý test byl prohlášen za úspěšný, I když při něm nastalo několik technických problémů. Před příletem HTV-6, kdy bude Dextre použit na ostro, mají technici ještě dost času vyřešit všechny problémy, případně i naplánovat další zkoušky. Výhodou těchto robotických operací je, že jsou zcela řízeny ze Země, nenarušují tak rušný režim astronautů. Dextre by tak mohl v budoucnosti stále více zastupovat astronauty na vesmírných vycházkách, které jsou nebezpečné a velice náročné.

Zdroj: upload.wikimedia.org
Zdroje informací:
http://www.nasaspaceflight.com/
https://www.nasa.gov/
https://en.wikipedia.org/
Zdroje obrázků:
http://www.nasaspaceflight.com/…/2016-02-11-181647-350×250.jpg
https://pbs.twimg.com/media/Bm5ZCRlCQAAGt0P.jpg
http://www.cbsnews.com/…/090512_mbsu_orbit.jpg
https://upload.wikimedia.org/…/800px-Dextre_Expedition27.jpg






{kind=link}
{kind=link}
{kind=link}
{kind=link}
Velmi zajímavá mašina, o které jsem měl dosud jem velmi málo informací. Spolu s článkem o „průzkumu“ kanadské ruky to dělá velmi solidný výsledek a hojné rozšíření obzorů, díky!
E
Dumám nad tím, co se děje s robonautem na ISS.Ten byl přeci určen jako náhrada astronautů na ISS.Byl kolem něj celkem velký humbuk,když jej raketoplán dopravil na stanici a najednou ticho po pěšině.Bylo to v roce 2011 a robonaut pořád sedí uvnitř stanice.Těšil jsem se na něj a fandil mu a nic.Nebo se mýlím?
Robonaut se používá hlavně k testování systémů. Zkouší se programy k jeho ovládání, zjišťuje se, jak pracuje s tlačítky a přepínači a podobně. Kromě toho dělá na stanici rutinní práce jako je třeba měření průtoku vzduchu k filtrům a podobně.
Teda být astronautem na ISS a vědět, že mi leze po povrchu stanice nějaký klíště, ještě k tomu ovládaný ze Země… To aby byl člověk pořád napnutej, kdy to prorazí stěnu 🙂
Ale je v tom budoucnost. S rozvojem kosmických letů bude údržba vyžadovat stále víc člověko-hodin a takhle se můžou dělat opravy i během noci.
Bravo.
PS: na tý robotický paži je tolik kloubů, že navlíct si oblek virtuální reality k ovládání, tak si člověk vylomí ruku.