
Roku 1972 proběhl poslední let s kluzákem M2-F3, který vzešel ze svého předchůdce, tedy M2-F2. O M2-F3 by se dalo mluvit i jako o „Fénixovi“, který vzešel z popela, v našem případě z vlastní nehody. M2-F3 prokázal účinnost konstrukce s přidaným středním stabilizátorem, který významně omezil boční oscilace a jev PIO. Nebyl to však jediný stroj, který vznikal v dílnách NASA. Dalším strojem byl HL-10, který vzešel ze střediska v Langley. Patrně nejvlivnějšího střediska pod agenturou NASA. Vztlakové těleso HL-10 se už na pohled značně lišilo od svých partnerských strojů M2-F2 a F3. Na tomto stroji byla totiž použita jiná filozofie konstrukce, jinak řečeno odlišný profil draku, který byl blíže ke konceptu Hanse Multhoppa, známém jako SV-5. Tedy stroj ve tvaru delty s plochým dnem a vyprofilovaným horním tvarem a odtokovou částí draku.
HL-10 „Horizontal Landing“

Zdroj: flickr.com
V průběhu celého seriálu postupně rozebíráme historii vztlakových těles, i když jsme v počátku začali překonáváním bariér a následně se věnovali nerealizovanému projektu Dyna Soar. Po ukončení Dyna Soar pokračovalo USAF alespoň ve výzkumu vztlakových těles s možností návratu z orbitální dráhy. Dalším subjektem, který se zajímal o stejnou oblast, i když z jiného důvodu, byla agentura NASA. NASA v počátcích výzkumných letů uvažovala o použití vztlakových těles jako prvních kosmických lodí. Přednost nakonec dostaly „kapsle“, které byly na realizaci „jednodušší“, protože nikdo neměl zkušenosti s možnostmi využití vztlakové konstrukce k návratu s řízeným přistáním. Byla to natolik nová myšlenka, že mnoho odborníků se domnívalo, že vývoj takové technologie pojme mnoho času s nejistým výsledkem, což v době vesmírných závodů nepřicházelo v úvahu. Vývoj u USAF jsme probrali a následně jsme se zaměřili na vývoj tvaru M2 z rýsovacího prkna inženýra Alfreda J. Eggarse. Nyní se budeme zabývat strojem, který také patří pod hlavičku NASA, ale jeho tvůrcem je středisko v Langley, které mělo mnoho zkušeností s podobnou kategorií, v rámci výzkumu ve větrných tunelech. Konstrukce HL-10, která vznikla v Langley významně přispěla k pochopení celé problematiky letů se vztlakovými tělesy. Původně byla snaha, ze strany Flight Research Laboratory, upozadit HL-10 a dát přednost stavbě více kusů stroje M2-F3. Jak víme z minulých dílů, nestalo se tak.
Počátky studií o vztlakovém tělese sahají, u střediska v Langley, do roku 1957, kdy v aero-fyzikální divizi vyhodnocovali různé tvary, použitelné pro návratové těleso. Základem studie byla vícenásobná použitelnost, pevná geometrie, nízká rychlost ohřevu, schopnost řízení letu v celém rozsahu rychlostního profilu a horizontální přistání s využitím motoru. Výsledkem těchto studií bylo tzv. Manned Lifting Re-entry Vehicle (MLRV). Tedy stroj s „obráceným“ profilem draku, kde spodní část trupu byla plochá a horní část byla profilovaná, jinak lze také říct s negativním vzepětím. Právě koncept MLRV byl později zjednodušen na prosté označení „lifting body“. Studie dále prokázaly, že kluzák s aerodynamickou klapkou, plochým dnem a přídí svírající úhel 20° bude stabilní ve všech třech osách. Výsledky byly pak prezentovány širší odborné veřejnosti v rámci NACA, roku 1958 došlo pak ke změně na NASA. Výsledky prezentoval John Becker, o kterém jste už mohli slyšet během povídání o X-15. Středisko doufalo, že by koncept mohl být použit jako první stroj, který dopraví prvního Američana za hranice naší atmosféry. Koncept však přijat nebyl a přednost dostaly balistické „kapsle“ z projektu Mercury. Pro zajímavost uvedu, že mnozí se o této lodi vyjadřovali jako o „plechovce pro člověka“. Tento první neúspěch však neodradil Langley od dalšího výzkumu. Dál pokračoval vývoj stroje, u kterého se intenzivně zkoumal použitý tvar trupu s negativním prohnutím či vyklenutím. Sama konstrukce stroje slibovala i možnost využití v rámci vesmírných misí, díky tloušťce profilu draku, která umožňovala postupem času zvětšit objem vnitřního prostoru až pro dvanáct astronautů. Debat okolo použití profilu bylo mnoho, mnozí se zastávali použití symetrického tvaru a další skupina byla pro negativní prohnutí. Nutno dodat, že druhá varianta, která šla i do ostrého testování, dokázala z většiny splnit zadané požadavky studie. Jediný bod, který druhá varianta nedokázala naplnit, byl nižší úhel náběhu v podzvukových rychlostech.

Zdroj: nasa.gov
Jedním z mužů, kteří stáli na pozadí vzniku HL-10 a celého vývoje kolem této konfigurace byl i inženýr Eugene „Gene“ Love. Právě G. Love navrhl tvar HL-10, během vývoje v Langley. Sám věřil, že tato kategorie má velký potenciál a není se tak čemu divit, že patřil k velkým kritikům využití balistických kapslí, jako vesmírných lodí. Samotný Gene Love pracoval ves středisku v Langley od roku 1947, kdy nastoupil jako pracovník u nadzvukového tunelu. V srpnu roku 1956 byl pak jmenován jako vedoucí hypersonického oddělení Aero-fyzikální divize. Jeho cesta se ale tady nezastavila a následně roku 1959 nastoupil na funkci zástupce náčelníka celé divize. V roce 1970 se mu podařilo společně s vedením střediska reorganizovat jeho strukturu tím, že oddělil vesmírný výzkum od výzkumu hypersonických letounů. Touto reorganizací vznikla nová divize Space Systems. Vedoucím nové divize se stal právě Gene Love. Gene Love se významným způsobem podílel na vývoji raketoplánu, kdy mu byly přiděleny povinnosti vedoucího skupiny pro technologii raketoplánu. Jako vedoucí skupiny měl významné slovo a vliv na vývoj raketoplánu a mnozí z dodavatelů žili v přesvědčení, že je ředitelem Langley. Tento dojem nabyli po mnoha jednáních, kdy byl Gene Love tvrdý a ustoupil pouze jasným a logickým argumentům. Mnoho kolegů ho občas považovalo až za tvrdohlavého muže. Nutno dodat, že Gene Love byl velmi všestranný člověk, který se nezabýval pouze letectvím a kosmonautikou. Například byl vyhlášený, jako mistr brusič drahokamů a odhadce drahých kamenů. V tomto směru vydal třísvazkové pojednání o designu broušených drahokamů. V roce 1981 mu byla udělena medaile NASA Exceptional Service Medal,
„Za vynikající vedoucí postavení při definování konstrukce raketoplánu a charakteristik systémů během jeho formativních fází a za významné příspěvky k technologické základně, která umožnila úspěšný let STS-1“.
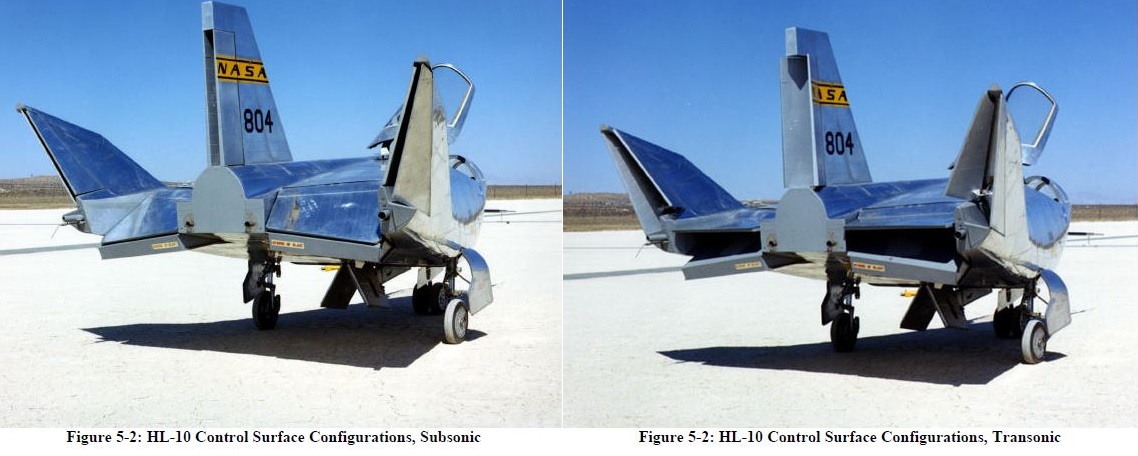
Nyní se opět vrátíme ke konstrukci HL-10. Podobně jako tomu bylo i u jiných podobných strojů, došlo opět k využití leteckých celků z jiných letounů a zapůjčení agregátů vnitřních systému od vlády. Například přední podvozková noha byla použita z letounu T-39. Co se týče řízení, kluzák byl opatřen celkem šesti řiditelnými plochami. První dvě byly na vertikálních stabilizátorech, jinak směrová kormidla, další dvojice pak byly v horní a dolní části draku. Navíc byly horní a dolní plochy nastavitelné podle rychlostní oblasti, ve které zrovna prolétaly, tzn. že se symetricky rozevíraly do pomyslného klínu. Stejný princip řízení už jsme mohli zaznamenat například u vztlakového tělesa X-24. Jedním z problémů, který museli konstruktéři řešit, a nejen u HL-10, byla směrová stabilita. Ta vykazovala už od začátku špatné výsledky a bylo nutné provést úpravu konstrukce před finální výrobou u společnosti Northrop. Výsledkem měření se stala úprava vertikálních ploch, kdy došlo ke zvětšení velikosti jak krajních stabilizátorů, tak centrálního stabilizátoru. Pro úplnost k řešení uvedu, že směrová nestabilita se nejvíce projevovala při rychlosti okolo M=1,5. Dalším efektem úpravy bylo zvýšení poměru vztlaku a odporu při přiblížení k přistání. Středový stabilizátor byl využit pro umístěná aerodynamických vzdušných brzd, které měnily svůj úhel rozevření podle rychlostní oblasti, tzn. se zvyšující se rychlostí docházelo k rozevření do klínu. Horní klapky pak měly dvou režimový chod. To znamená, že pro řízení náklonu byl chod klapek diferenciální a pro řízení klopení symetrický. Spodní plochy pak sloužily k úpravě základní obtékané plochy a tím i odporu při nízké rychlosti. Samotný systém řízení byl opatřen základním systémem SAS (Stability Augmentation System). Pro zajímavost uvedu, že inženýrem zodpovědným za výpočty stability byl Bob Kempel, který pracoval i okrajově na M2-F3, u kterého byl značně nespokojen s jeho boční nestabilitou a dával to také hlasitě najevo. Právě při vývoji HL-10 si dal za úkol, že tento stroj bude patřit k nejlepším v celé kategorii vztlakových těles, co se týče stability a řiditelnosti.
Zdroj: Testing Lifting Bodies at Edwards
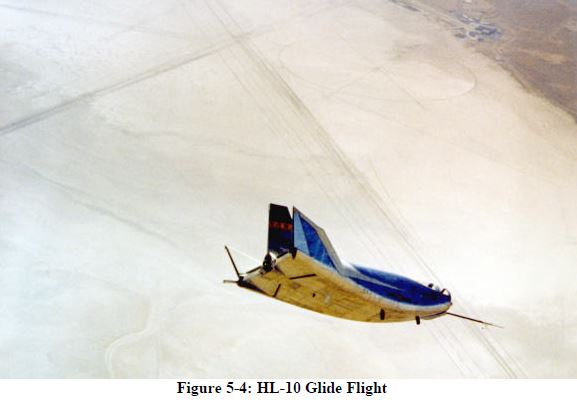
Zakázku na výrobu HL-10 obdržela společnost Northrop, která už měla na starost i stavbu kluzáku M2-F2 z dílny FRC a Ames. Zatímco M2-F2 byl dodán na Edwardsovu leteckou základnu v červnu roku 1965, tak HL-10 následoval až v lednu 1966. Po dodání na základnu, ke středisku FRC, následovalo obvyklé kolečko úkonů, jako bylo dodatečná montáž výstroje kluzáku, zkoušky atd. Stejný postup jsme zde už mnohokrát probrali. Na první společný let s NB-52 se měl kluzák vydat už 21. prosince 1966, ale kvůli závadě v elektrickém systému jednoho z kormidel stabilizátoru se musel let zrušit. Další pokus se uskutečnil 22. prosince. Za řízení si usedl pilot Bruce Peterson (kterého teprve čekala ona nešťastná událost) a po hladkém odpoutání od nosného letounu pokračoval bezmotorovým letem k Rogersovu jezeru, aby přistál na dráze 18. Během samotného letu se postupně s navyšující se rychlostí projevovaly oscilace v řízení, a to především v příčné ose kluzáku a částečně i v podélné. Tyto oscilace byly identifikovány jako „mezní cyklus“, to znamená rychle rostoucí oscilace řídicí plochy, ke které dochází, když citlivost automatického stabilizačního systému je příliš vysoká. Všechny své poznatky předával Peterson okamžitě do řídicí střediska, aby došlo k úpravě v citlivosti systému SAS, nastavením na nejnižší možnou hodnotu. Samotný kluzák přistál po letu trvajícím tři minuty a devět sekund. Pro zajímavost uvedu hodnotu průměrného klesání kluzáku během letu, a to 14 000 ft/min (4200 m/min). Nutno dodat, že pilotní umění Bruce Petersona dovedlo kluzák k bezpečnému přistání i přes značné problémy se zmíněnými oscilacemi, které měly na svědomí i zvýšenou rychlost na přistání.
Samotný problém s letem HL-10 neměl být původně důsledkem špatně predikované aerodynamiky, ale vnitřního systému řízení. Jako viník bylo označeno zpoždění systému SAS neboli hystereze. Tedy zpětná vazba v systému řízení s akumulovanou vůlí mechanických prvků a nelineární pohon kormidla.
Zdroj: Testing Lifting Bodies at Edwards
Zdálo by se, že budou probíhat další lety, ale opak byl pravdou. Celý tým, který vyvíjel HL-10, byl značně zklamán výsledkem letu. Nabývali pocitu, že všichni ti, kteří jim celou dobu tvrdili, že to co navrhli, nebude fungovat, měli pravdu. Provedli úpravy v systému SAS a s pomocí Bruce Petersona chtěli přesvědčit Paula Bikleho k povolení na další let. Byl zde však jeden člen týmu, který nesdílel stejný názor, a dokonce si myslel, že tým HL-10 tak úplně nechápe celý problém, který během letu nastal. Tím člověkem byl Wen Painter, který prováděl vlastní analýzy a argumentoval tak proti dalšímu letu. Nakonec se další let neuskutečnil, bylo nutné provést podrobnou analýzu, tak, jak navrhoval Painter. Problém totiž nebyl pouze v systému SAS, ale v účinnosti horních klapek řízení, jinak i elevonů, v kombinaci se zpětnou vazbou do systému SAS o frekvenci 2,75 Hz. Řešením se stalo snížení citlivosti systému SAS a modifikace strukturální rezonance. Tento problém byl velmi náročný na řešení a zabral inženýrům několik měsíců intenzivní práce. Je nutné dodat na obranu celého týmu, že ne vždy je možné vše zjistit a změřit z modelů a simulátorů. Samotní piloti byli překvapeni letovou vlastností stroje, protože na simulátoru se s ní vůbec nesetkali. Přece jen, v simulátoru je pilot „uvolněnější“, protože mu defacto nic nehrozí a další stránkou je to, jakými daty „nakrmíte“ simulační program.
Při podrobné analýze mezi skutečným letem a simulací počítače je ideální varianta, kdy dochází ke shodě dat mezi počítačem a samotným letem. Menší odchylky nejsou nic závažného. V případě analýzy letu HL-10 tomu však bylo jinak. Inženýři museli provést podrobný rozbor letu po jednotlivých časových úsecích, což při tak krátkém letu znamená sekundu po sekundě. V našem případě byla nejzajímavější část od páté do patnácté sekundy, kde inženýři vybrali několik manévrů, konkrétně dvanáct, a zkusili je porovnat s počítačovým řešením. Výsledkem bylo, že pouze sedm manévrů bylo proveditelných v simulaci a zbytek byl naprosto mimo možnosti simulace. To ukázalo, že se nelze spoléhat na simulovaný model a bude třeba provádět analýzu na skutečném letu s využitím matematických modelů. To vysvětluje i rozdíl mezi simulátorem a reálným letem, který tak překvapil piloty. Další jev, který se musel prozkoumat, byla odezva křidélek, která nebyla, dle Bruce Petersona, dobrá. Během letu totiž nastaly chvíle, kdy musel Bruce použít značnou výchylku pro boční řízení, ale odezva nebyla ani zdaleka taková, jaká by měla být. Podrobný rozbor zjistil, že hlavní příčinou je úhel náběhu. Pokaždé, když k problému došlo, byl úhel náběhu nad rozsahem 11 až 13 stupňů. Pokud byl však manévr proveden ve správném rozsahu úhlu náběhu, tak byly elevony dostatečně efektivní pro řízení. Tato skutečnost překvapila konstrukční tým, jelikož podle výpočtů, měli mít elevony vysokou účinnost, za ideálního letu.

Zdroj: Wingless Flight
Nakonec se inženýři Bob Kempel, Wen Painter a další rozhodli odjet do střediska v Langley, aby zde provedli rozbor s kolegy. Během schůzky se jeden z přítomných kolegů střediska při prezentaci výsledků a názoru na problém náhle rozčílil, hodil tužku na zem a vztekle vyskočil. Po chvíli, když se uklidnil, vysvětlil ostatním, že při vzniku HL-10 tušil, že mohou nastat v této oblasti problémy jaké byly popsány a velmi ho mrzí, že se nechal „ukolébat“ dalšími měřeními a kolegy, od adekvátního řešení. Pokud by totiž došlo k úpravě v aerodynamice ihned, pravděpodobně by k jevům nedošlo. Obecně se všichni shodli, že problémem bude především masivní odtržení proudnic v horní části profilu draku, spojených s úhlem náběhu mimo tolerance. Středisko v Langley přijalo plnou zodpovědnost za vyřešení problému. To, ale znamenalo nový výzkum a tím pádem uzemnění HL-10 na dobu, dokud nebude známo řešení, které zajistí bezpečný průběh letu.
[youtube https://www.youtube.com/watch?v=50dDWT48b9M?feature=shared]
[youtube https://www.youtube.com/watch?v=9sE88_Wz4uI?feature=shared]
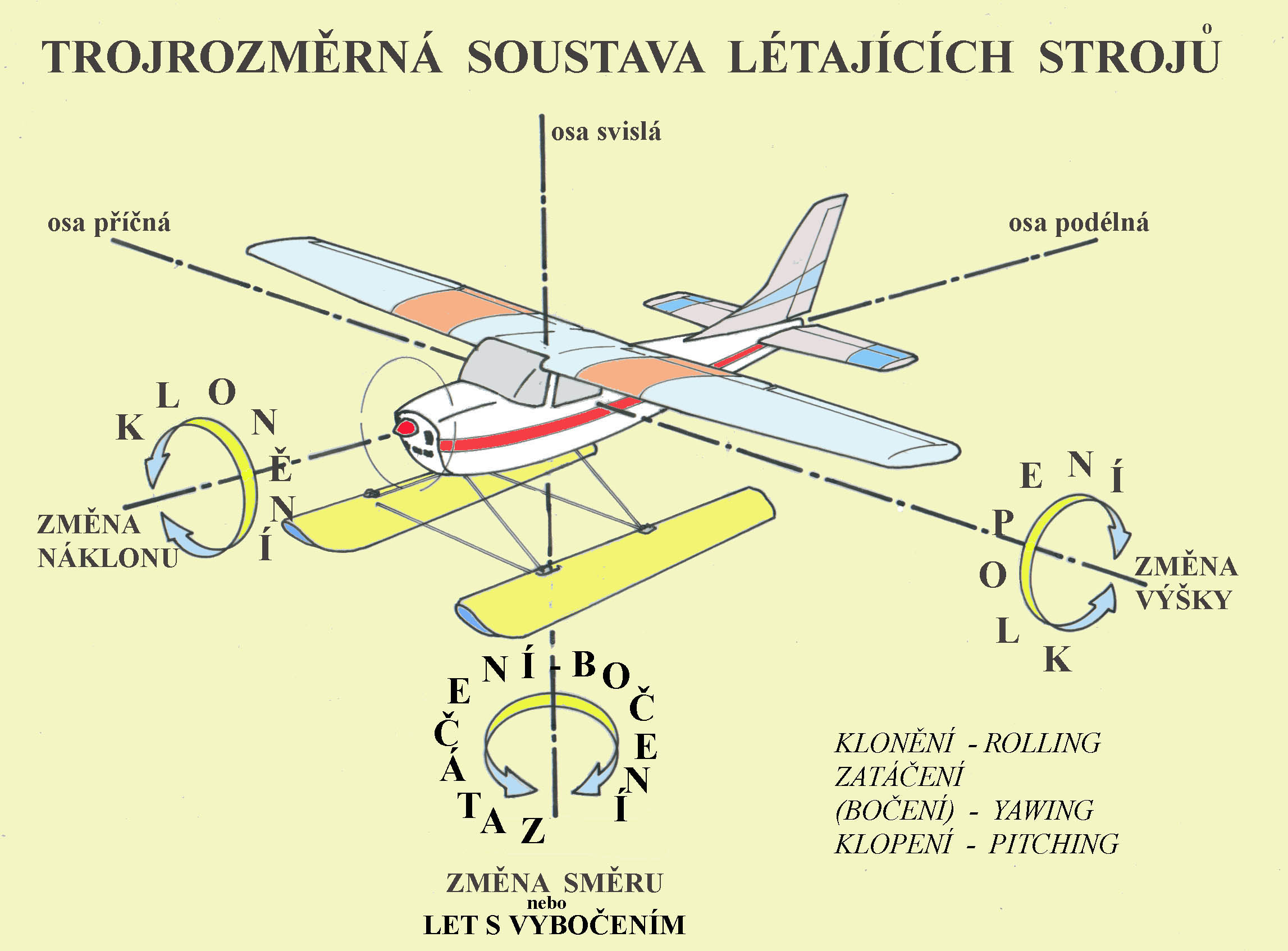
Dovoluji si přiložit obrázek zobrazující souřadnou soustavu letounu, pro lepší pochopení textu.
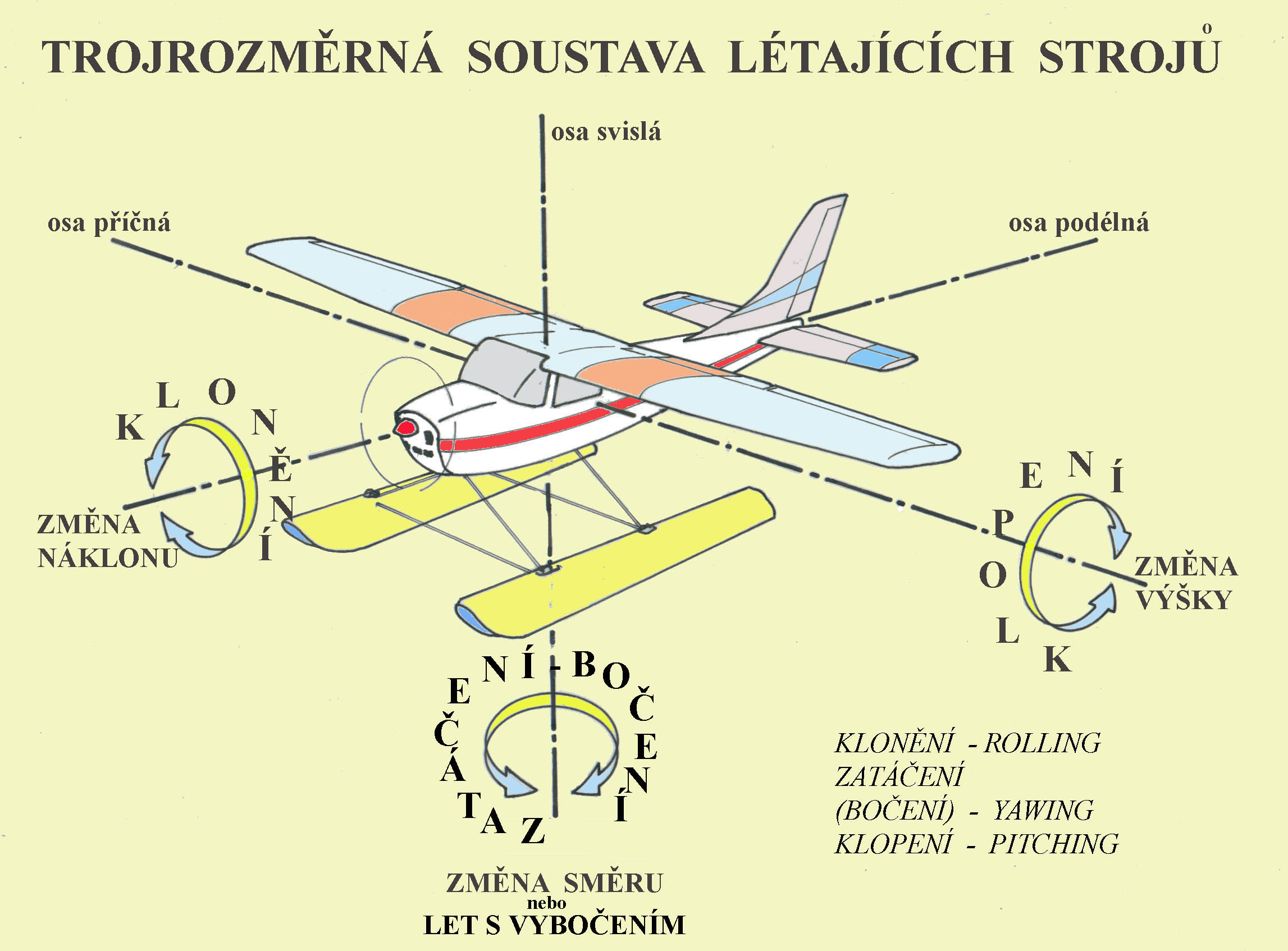
Zdroj: airspace.cz
Zdroje informací:
Wingless Flight, The Lifting Body Story, Autor R. Dale Reed, Rok vydání 1997
Testing Lifting Bodies at Edwards, Autor Robert G. Hoey, Rok vydání 1977
NASA Facts An Educational Services Publication of the NASA, LIFTING BODIES, Autor NASA
The Path to the Space Shuttle: The Evolution of Lifting Reentry Technology, Autor Dr. Richard P. Hallion, Rok vydání 1983
nasa.gov/centers-and-facilities/
Zdroje obrázků:
farm4.static.flickr.com/
flickr.com/photos/
www.nasa.gov/
www.airspace.cz/
Testing Lifting Bodies at Edwards, strana 63 a 64
Wingless Flight, The Lifting Body Story, strana 104







{kind=link}
{kind=link}
{kind=link}
Díky za další dílek do x-puzle 🙂 Četlo se to jak detektivka, paráda.
Dobrý den,
mockrát děkuji za chválu. Snažil jsem se přejít od technického popisu stroje k popisu aerodynamiky a problematiky letu, protože po technické stránce se to v podstatě stále opakuje.
Za sebe můžu říct, že hodně čtivosti pomáhá, když je tam nějaký příběh. A také když je nalezený způsob, jak zjednodušit složitou mnohokrát rozvětvenou realitu do něčeho lineárnějšího (právě na to pomáhají ty příběhy). Jinak se jako čtenář zapletu do odboček a technických zkratek…
No a samozřejmě také pomáhá, že se hodně zlepšila čeština vašich článků, co se gramatiky i stylu týče. V posledním díle mě zarazily už jen ty nadbytečné čárky, jinak jsem si na první pohled ničeho zásadního nevšiml a článek se mi četl dobře.
Přesně jak píšete, příběh. U každého dílu strávím mnoho času hledáním zajímavostí okolo hlavního tématu. Vysvětlování složitých témat je vždy záležitost, kde čekám, jak bude přijato čtenáři, protože i zde trávím mnoho času nad zjednodušením. Díky za upozornění k češtině a stylistice. Dobře si uvědomuji, že moje první články byly opravdu hrůza. Naštěstí, jak mi říkal Dušan Majer, musí se člověk vypsat. Nadále se budu snažit vylepšovat kvalitu a gramatiku.
Díky za přízeň.
Díky za další skvělé čtení! Jako obvykle brilantní
Dobrý den,
velmi děkuji za pochvalu. Jsem rád, že čtení táhne a snad nezamotalo hlavu
Měl bych dotaz k simulátorům, které v seriálu občas zmiňujete.
Například v tomto díle píšete o „krmení simulačního programu“… To by znamenalo, že už tenkrát prováděli simulaci na digitálním počítači, což se mi moc nezdá.
Můžete uvést zdroj, ze kterého jste čerpal?
Není „computer“ jako „computer“. Dnes už si to většina lidí neuvědomuje, ale tehdy se běžně používaly také počítače analogové. Ty si lze zjednodušeně představit jako pro daný problém příslušně zapojený systém z analogových integrátorů, děličů, zesilovačů, násobiček, sčítaček atd… Právě tehdy to mělo výhodu v tom, že bylo možno obejít omezený výkon tehdejších digitálních počítačů a v reálném čase řešit např. diferenciální rovnice.
Takže bych řekl, že ty simulátory byly velmi pravděpodobně analogové a žádný program v nich neběžel. Ale také se mohu mýlit – proto mě zajímá ten zdroj.
Děkuji.
Dobrý večer,
jednalo se samozřejmě o analogové počítače, pravděpodobně IBM7090, které byly v té době využívány i ve vesmírném programu. Ve dvacátém díle se zmiňuji o simulátoru s pěti nastavitelnými potenciometry. Ale chápu Váš zájem. Pokud jsem se dopustil chybné interpretace, tak se omlouvám, možná jsem se nechal unést angličtinou nebo jsem pojem „program“ bral příliš obecně, ať už by šlo o magnetickou pásku. Zdroje jsou vždy uvedeny pod článkem, ale nejsem si jist zda v nich najdete to co Vás zajímá, ale v tom případě se jedná o Wingless Flight, The Lifting Body Story, Autor R. Dale Reed.
Dovolím si přidat odkaz, který jsem právě našel, snad to bude to co hledáte.
https://history.nasa.gov/computers/Part3.html
Nedalo mi to a hledal jsem . Z uvedeného zdroje doporučuji stránky 120 a dál.