
V předchozím díle jsme probírali vztlakový letoun X-24A. Šlo vlastně o následníka úspěšného SV-5 vyvinutého v dílnách společnosti Martin Marietta. SV-5 byla velmi úspěšná aerodynamická konfigurace, která byla původně použita už v programu X-23 PRIME. Dále pak pokračovalo využití v programu X-24A, který měl za úkol ověřit možnosti pilotovaného letu s přistáním. Vztlakové těleso X-23 ověřilo návrat do atmosféry v rychlostním rozmezí Mach=24 až Mach=2, na které pak navázal kluzák X-24A, který létal do rychlosti M=2. Další otázka, která se začala okolo programu objevovat, byla o použití stroje s takovými parametry. Přece jen parametry a konfigurace dosahované X-24A v kombinaci s X-23 se nejlépe hodily k plnění úkolů, jako vynášení nákladů, lidí a družic na oběžnou dráhu Země. Podobně jako později s raketoplánem. Ale projekt X-24 spadal stále pod program START (Spacecraft Technology and Advanced Reentry Tests) a to znamenalo, že hlavní směr udávalo letectvo. USAF mělo zájem, aby se dokázala zvýšit flexibilita a praktický dolet vztlakového tělesa. Proto se začal rozvíjet další pokračovatel X-24A.
X-24B 1/2

Zdroj: dfrc.nasa.gov
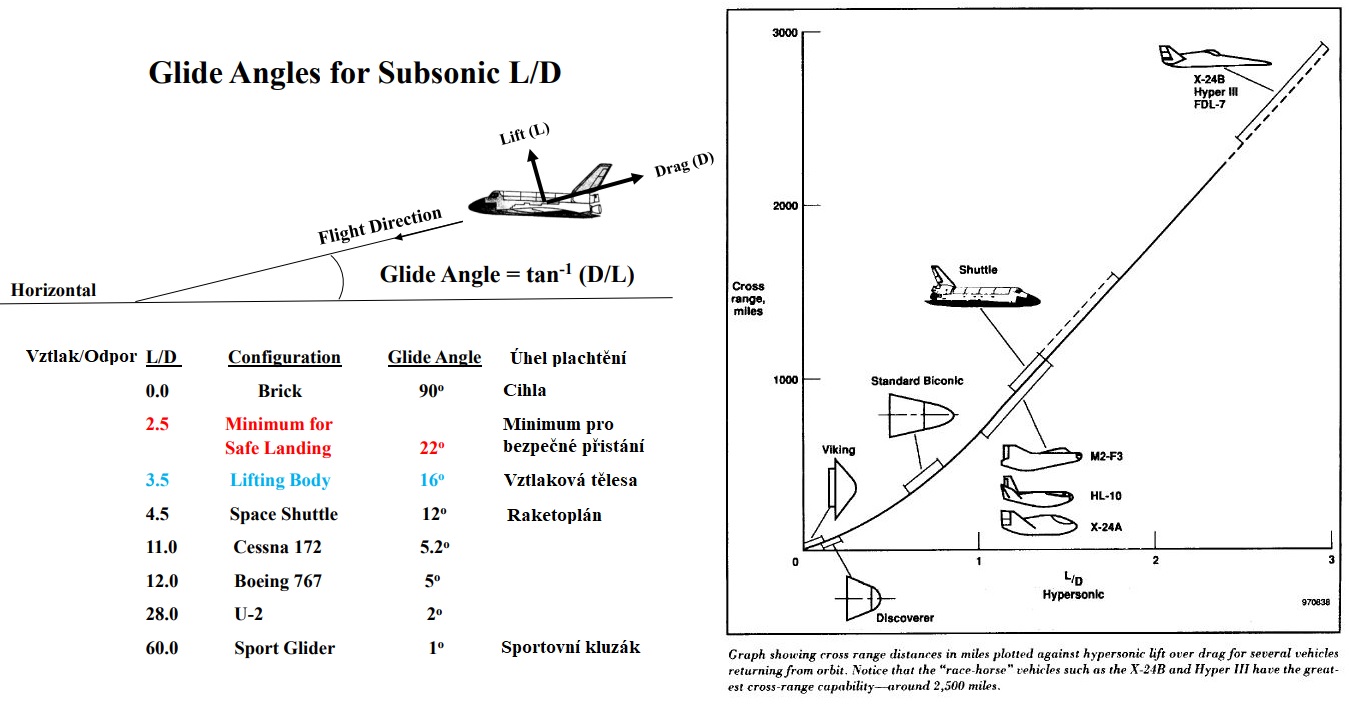
Předtím, než se zde budeme zabývat dalším kluzákem X-24, tentokrát s indexem B, tak se musíme podívat zpět do historie vzniku tohoto stroje. Stroje jako HL-10, M2-F2 či X-24A měly potencionální dostup okolo 700-1000 mil (1126–1609 km) s poměrem vztlak/odpor okolo 1,0-1,4. To znamenalo, že se stroj mohl během opětovného vstupu pohybovat od 350 do 500 mil (563-804 km) na obě strany orbitální dráhy. Navíc tyto troje měly poměr vztlaku a odporu vhodný k provedení řízeného přistání. Právě možností zvýšení poměru vztlak/odpor a tím i navýšením doletu se začala zabývat laboratoř FDL (Flight Dynamic Laboratory). Cílem bylo dosáhnout hodnoty poměru vztlak/odpor 3,0 s doletem 3000 mil (4828 km), tzn. 1500 mil na obě strany orbitální dráhy. Za tímto účelem zkoumala FDL různé tvary o velké štíhlosti trupu ve tvaru šipky s plochým dnem. Tyto stroje by měly díky svému tvaru dobré letové vlastnosti v hypersonické oblasti letů, ale už ne v oblastech rychlostí před přistáním. Konstruktéři se tento problémy snažili zpočátku řešit přidáním páru vysouvací křídel, která se vysunovala právě na přistání. Další možností byla i měnitelná geometrie křídel. Laboratoř FDL v tomto směru vyvíjela stroj FDL-7, což byl vlastně kluzák, který měl zadní plochy upraveny tak, aby produkovaly vztlak při podzvukovém letu. Podobnou konfigurací se zabývaly i laboratoře NASA (Flight Research Center) v Ames a Langley. Výsledkem jejich vývoje byl kluzák Hyper III, určený na podporu projektů M2. Tento kluzák byl bezpilotní s dálkovým řízením. To znamená, že kluzák byl vlečen za vrtulníkem, poté se odpoutal a dálkově řízeným letem přistál na dráze Edwardsovi letecké základny. Pro zajímavost uvedu, že například přebytečné díly hydraulického systému určeného pro X-23 PRIME byly použity právě u kluzáku Hyper III.
Zdroj: Wingless Flight, The Lifting Body Story
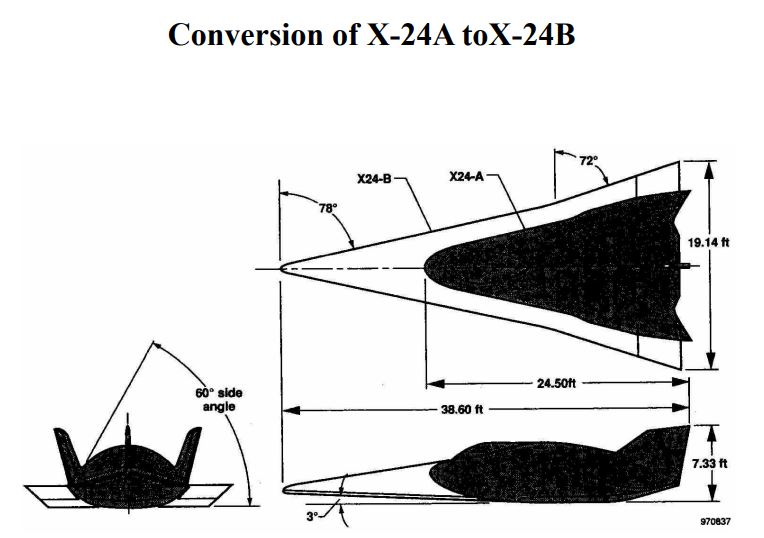
V polovině roku 1960 začaly studie o spojení vývojové studie FDL-7 spolu s vyvinutým kluzákem SV-5J. Princip byl prostý, tvar FDL-7 se zakomponoval do konstrukce SV-5J, aby vznikl stroj o velké štíhlosti a prodloužené nástavbě v přední části s plochým dnem. Velikou výhodou tohoto spojení mělo být dosažení poměru vztlak/odpor při přistání okolo hodnoty 4,0. Nová konstrukce byla pojmenována jako FDL-8. Výhodou spojení těchto dvou konstrukcí bylo dosažení letových vlastností pro všechny rychlostní oblasti, kterými FDL-8 bude prolétávat. Samotná myšlenka využití SV-5 se velmi líbila manažerovi vztlakových těles USAF a řediteli NASA Dryden Flight Research Center, Paulu Biklemu. Problémem se však ukázal generálmajor Paul T. Cooper, který s touto myšlenkou na využití stávajícího X-24A nesouhlasil a požadoval přezkoumání ze strany Vědeckého poradního sboru letectva a Národní akademie věd. Tento panel došel k závěru, že USAF by mělo přistoupit k realizaci takového stroje. Nyní měl nový projekt volnou cestu. Aby mohl nový projekt začít co nejdříve, došlo k prvotní finanční podpoře ze strany NASA, protože schválení ze strany velení USAF se zpozdilo. Agentura poskytla na rozjezd projektu půl milionu dolarů. Nyní se z toho tedy stává společný projekt USAF a NASA. Než však mohlo dojít k přestavbě, museli inženýři počkat, až X-24A dolétá svou sérii výzkumných letů, aby mohl být odeslán do výrobního závodu společnosti Martin Marietta. Kontrakt na tuto přestavbu obdržela společnost Martin dne 1. ledna 1972. O měsíc později došlo i k formálnímu podpisu memoranda o spolupráci v oblasti vztlakových těles mezi USAF a NASA zahrnující i nový stroj pojmenovaný jako X-24B.
Zdroj: Martin X-24A Lifting Body
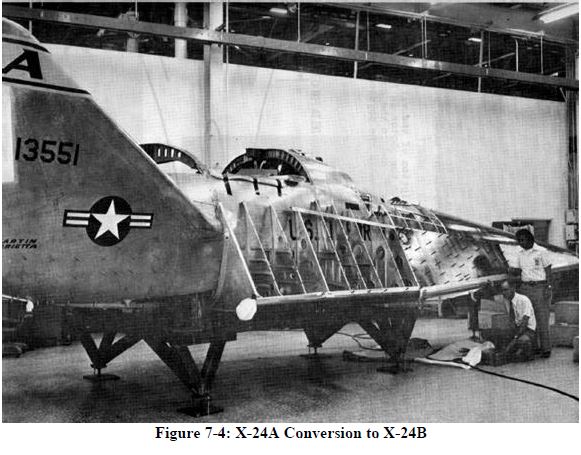
Dalším krokem v realizaci stroje byly i dodatečné testy v aerodynamickém tunelu a ověření hmotnostní charakteristiky. Tím, že došlo ke značnému prodloužení přední části a úpravě tvaru se samozřejmě změnilo i rozložení hmotnosti. Systémy kluzáku zůstaly zachovány už z původní varianty kluzáku. Jednou z mála změn se stala výměna pohonné jednotky XLR-11, která byla vyměněna za výkonnější typ. Pro přestavbu X-24A byli vybráni technici, kteří se podíleli už na stavbě původního X-24A a tím pádem znali tento stroj do detailu po všech stránkách. Princip přestavby spočíval tedy ve vytvoření nástavby přední části přidáním žebrování na původní potah X-24A. Došlo tím samozřejmě i k posunu přední podvozkové nohy pro zachování centráže. Výkresovou dokumentaci nového tvaru přídě poskytla společnosti Martin přímo vývojová laboratoř FDL. Při posunu podvozku do přední části došlo i na jeho změnu. Vlivem větší váhy letounu bylo nutné zvolit vhodnější podvozek, který dokáže absorbovat větší množství energie. Volba padla na podvozek z letounu F-11. Kvůli větší hmotnosti došlo i na výměnu hydraulických pohonů, které byly příznačně dodány z letounu X-15. Jedním z problémů se u X-24B stala možnost vystřelení pilota z kluzáku už během letu s nosným letounem NB-52. To znamená vystřelení ještě ve spojené konfiguraci s NB-52 bez oddělení. U této záležitosti se na chvilku zastavíme. Už v dobách letů X-15 byl nosný pylon konstruován tak, aby kabina pilota byla vystrčena před křídlo NB-52. To znamenalo, že v případě problémů u NB-52 se mohl pilot vystřelit, i když byl letoun stále připojen k NB-52. Tato možnost byla použita dále u X-24A a u strojů NASA. Pro tyto kluzáky byl vyvinut zcela nový adaptér pro zavěšení na původní pylon po X-15. U X-24B však tato možnost už nebyla možná vzhledem k těžišti stroje. To znamenalo jediné, přijmout toto riziko. V praktickém případě to znamenalo, že pokud by NB-52 nebo X-24B měl problémy, musel se nejdříve kluzák odpojit. Díky tomuto faktu letěl NB-52 nižší dovolenou rychlostí, aby bylo možné provést okamžité oddělení X-24B s přijatelnou rychlostí pro případnou katapultáž.
Zdroj: Testing Lifting Bodies at Edwards
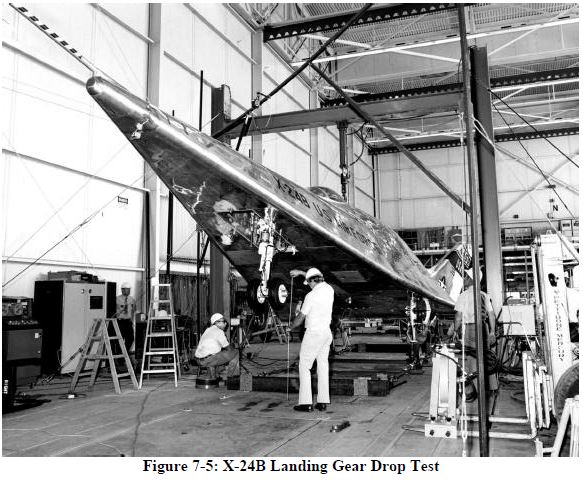
Nyní se budeme věnovat řízení kluzáku, které bylo trochu odlišného od svého předchůdce. U X-24B došlo k přidání malých křidélek, která byla montována v přidané nástavbě. Tzn. na odtokové straně delty vedle vertikálních stabilizátorů. Tím se počet ovládaných ploch řízení zvedl z osmi na deset. Stejný způsob užíval i kluzák NASA HL-10. Tyto dvě nové plochy byly použity pouze k řízení náklonu, a to pouze v omezeném rozsahu 5° na obě strany. Dalším rozdílem bylo, že horní a dolní klapky nebyly užity pro kontrolu náklonu. Zbylá část řízení zůstala zachována jako u X-24A. Důvodem, proč je řízení letu u X-24A i B věnována taková pozornost je fakt, že právě poznatky z provozu těchto kluzáků byly přímo použity při vývoji raketoplánu a samotný raketoplán využíval při svém letu stejné principy jako X-24. Dalším přidaným zařízením do X-24B se stal varovný systém překročení úhlu náběhu, který varoval pilota o přiblížení k letové oblasti se sníženou stabilitou. Později k tomuto systému přibyl i systém sledování bočního skluzu se zvukovou signalizací. Ještě jednou se budeme věnovat i podvozku X-24B. Jak bylo zmíněno, byla použita příďová podvozková noha z letounu F-11. Další změnou bylo i vysouvání podvozku dozadu, tzn. umístění podvozkové nohy kolem dopředu. Důvodem bylo zachování centráže během vysouvání na přistání. Samotné vysunutí zajišťoval pneumatický systém s velmi rychlou odezvou 1,5 sekundy. Důvod takto rychlého vysunutí byl prostý, podvozek se vysouval až těsně před samotným přistáním, aby nezvyšoval odpor v kritické části letu. Navíc byl přední podvozek, stejně jako u X-15, velmi nízko oproti hlavním nohám.
Zdroj: Testing Lifting Bodies at Edwards
Inženýři tentokrát opustili od závěrečných testů v aerodynamickém tunelu pro ověření konfigurace X-24B s nosným pylonem letounu NB-52. Předchozí výsledky X-24A a výsledky z měření modelů ukázaly, že nebude nutné provádět velké úpravy adaptéru. Jedním z bodů velkého zájmu se pak stalo měření obtékání vzduchu na vnitřní části vertikálních stabilizátorů. Tento zájem měla hlavně laboratoř NASA FRC. Za tímto účelem NASA sponzorovala instalaci měřícího vybavení do kluzáku. Jedním ze systémů, který se vrátil do provozu u X-24B bylo i řízení příďového podvozku, které bylo u X-24A z bezpečnostních důvodů nakonec vyřazeno. Celý systém byl pečlivě zkoušen při pojížděcích zkouškách na dně vyschlého jezera. Postupně docházelo ke zvyšování rychlosti pomocí raketového motoru, který nakonec běžel na dvě komory při dosažené rychlosti 150 knotů (277 km/h). Všechny testy prokázaly, že nyní je systém plně použitelný.
Nyní si dovolím malou odbočku od tématu. Pro znázornění jakéhosi propojení mezi letectvím a kosmonautikou uvedu jeden další příklad. Do této chvíle zde rozebíráme stroje, které měly zásadní vliv na budoucí kosmické stroje. Ale samozřejmě tomu bylo i obráceně. Jeden příklad za všechny. Roku 1972 vzlétl letoun F-8, který využíval nový systém Fly-By-Wire bez mechanické zálohy řízení. Veškeré povely řízení byly vedeny elektronickou cestou bez použití klasických mechanických prvků. Právě na tomto letounu byl instalován palubní počítač, který byl upravenou verzí palubního počítače lunárního modulu z programu Apollo.

Zdroj: en.wikipedia.org
Závěrem o konstrukci X-24B mohu uvést, že tak jako u předchůdce X-24A se i zde vyskytly oscilace v řízení. Tentokrát se jednalo o oscilace v řízení křidélek, které byly čistě mechanické. Jednalo se o problém se servo pohonem. Řešením se stalo přidání tlumiče do ventilu servo pohonu. Celá modifikace kluzáku byla hotova za deset měsíců. Staro–nový kluzák X-24B se vydal na palubě letounu C-5 dne 24. října zpět na základnu Edwards AFB, kde měla proběhnout technická prohlídka celého stroje pracovníky NASA FRC. Nyní zbývalo začít s letovým programem, který bude obdobný jako u svých předchůdců. Tedy prvně proběhnou lety na pylonu NB-52 následované bezmotorovými lety. Po úspěšném zvládnutí pak přejde program do své hlavní části a tou jsou lety s raketovým pohonem.
Jak se už stává tradicí, opět si dovolím přidat pěkné video. Tentokrát se jedná o video z muzea USAF, kde můžete vidět oba stroje, X-24A a X-24B vedle sebe. Pro zajímavost uvedu, že X-24B je původní originál X-24A a vystavený exemplář X-24A je vlastně původní SV-5J.
[youtube https://www.youtube.com/watch?v=mWJYZZwcS1M]
Zdroje informací:
Design Evolution and AHP-based Historiography of Lifting Reentry Vehicle Space Programs, Autoři Loveneesh Rana a Bernd Chudoba, Rok vydání 2016
Wingless Flight, The Lifting Body Story, Autor R. Dale Reed, Rok vydání 1997
Testing Lifting Bodies at Edwards, Autor Robert G. Hoey, Rok vydání 1977
Martin X-24A Lifting Body, Autor Miles Miller, Rok vydání 2012
en.wikipedia.org/wiki/NASA_Hyper_III
Zdroje obrázků:
3.bp.blogspot.com/
dfrc.nasa.gov/Gallery/
en.wikipedia.org
Wingless Flight, The Lifting Body Story, strana 156
Testing Lifting Bodies at Edwards, strana 102
Testing Lifting Bodies at Edwards, strana 104
Martin X-24A Lifting Body, strana 96







{kind=link}
{kind=link}
{kind=link}
Díky za pěkné pokračování, už se těším na další díl o letových testech X24B a co bude následovat. Je skvělé, že zpracováváte tuhle méně známou část historie. A budu se opakovat, čitelnost opět ještě o kousek lepší, pořád jde nahoru s každým dílem, což je super. Tady bych poprosil jen o malou technickou nápravu: ty údaje o poměru vztlak/odpor obsahují spoustu nadbytečných mezer uprostřed čísel, chvíli mi trvalo než jsem to pochopil 🙂 Ale text jako takový se čte teď fakt dobře a pěkně na sebe navazují informace, aby se v tom čtenář vyznal. Díky a teším se na příště!
Dobrý den,
mezery jsem už odstranil. Moc děkuji za upozornění a pak hlavně děkuji za slova chvály. Jsem rád, že kvalita jde nahoru a dělá radost. Ne vždy se dá nějaké technické téma dobře zpracovat širší veřejnosti a tak jsem rád, že je to stále dobře srozumitelné. 🙂
…rychlostním rozmezí Mach=24 až Mach=2 …
Opravdu 24?
Zdravím,
V oficiálním rozpisu je uvedena rychlost okolo 26 600 km/h a max. rychlost M=25. To samé se uvádí i v jiných historických podkladech. Navíc X-23 PRIME měl suborbitální trajektorii