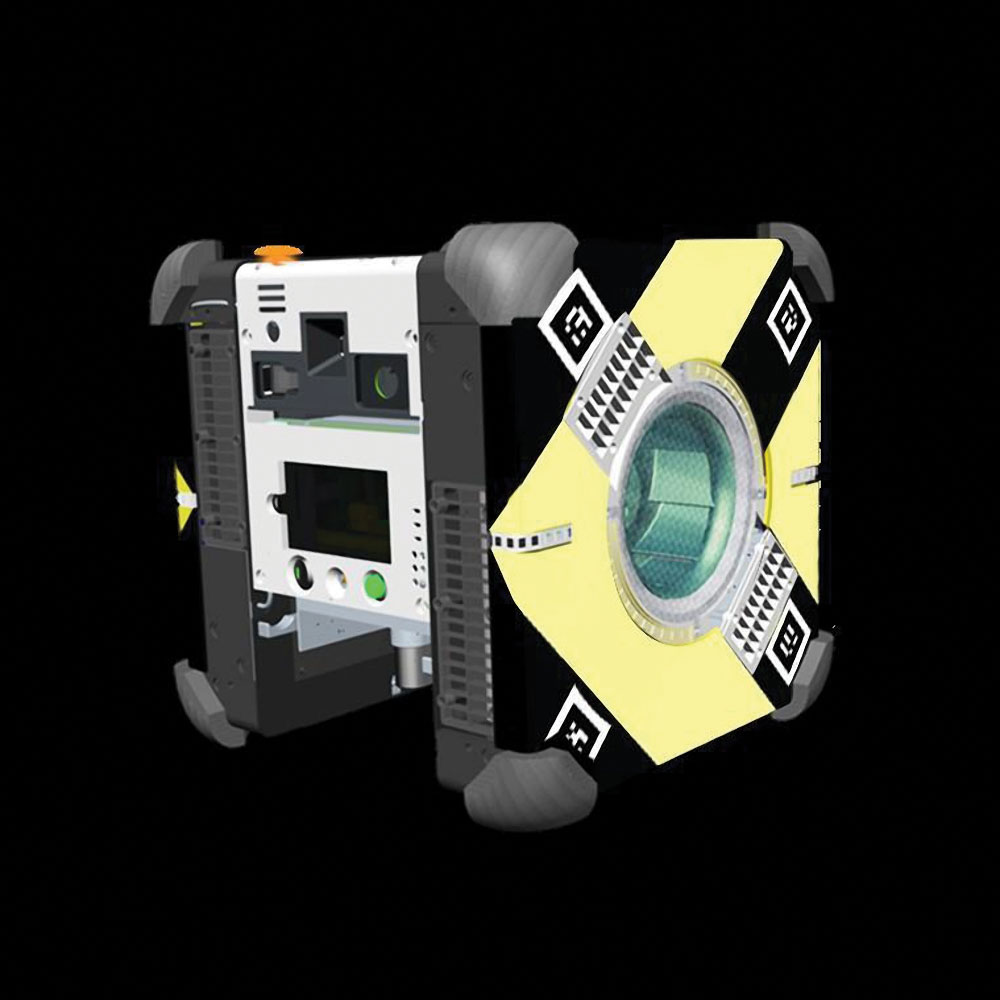
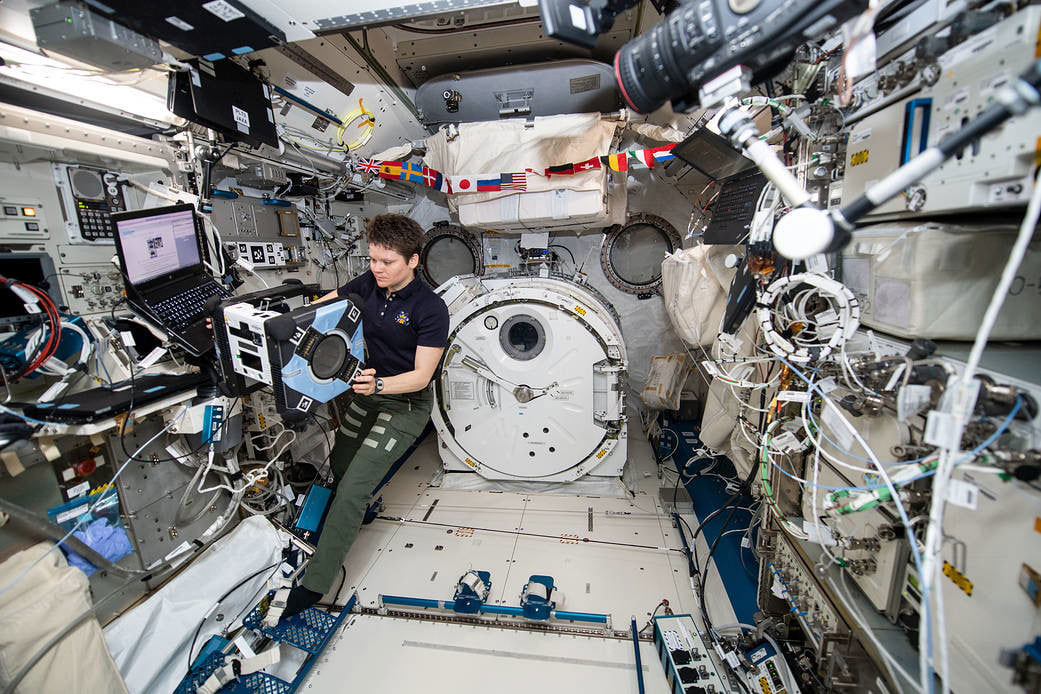
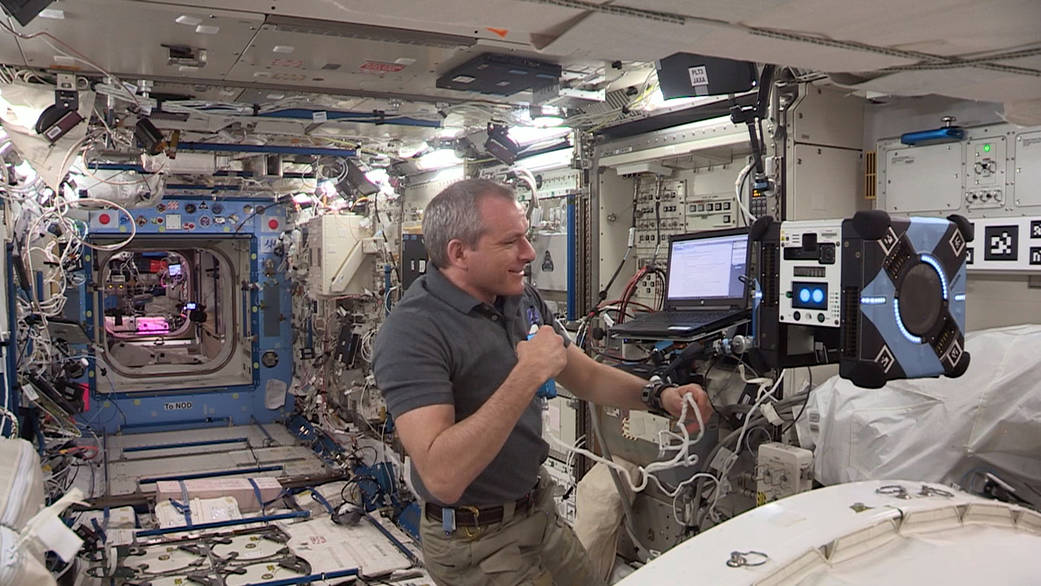
V dubnu 2021 se autonomně poletující robot typu Astrobee (viz náš starší článek), pojmenovaný Bumble, dočkal testu na palubě Mezinárodní kosmické stanice. Zkouška spočívala v průzkumu simulované anomálie. Simulace byla založena na tom, že by systémy podpory života na stanici detekovaly vysokou koncentraci oxidu uhličitého. Pokud by taková situace reálně nastala, představovala by pro sedm lidí, kteří žijí a pracují v této unikátní laboratoři, značné nebezpečí. Tady šlo ale pouze o simulaci. Malý robot krychlovitého tvaru se svižně pustil do pohybu po stanici, aby našel místo označené jako vpusť pro cirkulaci vzduchu. Následně zde použil své kamery a software analyzující záběry, aby hledal cizí objekt blokující vpusť vzduchu. Cizí objekt opravdu našel – ponožku. Ale žádný strach, jelikož šlo o simulaci, byl to jen vytištěný obrázek ponožky. Když Bumble detekoval překážku, zavolal si o pomoc s jejím odstraněním.
V rámci další zkoušky provedl Bumble průzkum sekce Bay 6 v japonském modulu Kibó, kde s pomocí různých senzorů vytvořil 3D mapu ve vysokém rozlišení. Během svého pohybu robot několikrát narazil do kabelů, ze kterých se vždy dokázal vymotat. Poradil si také se simulovanými přerušeními komunikace mezi Zemí a stanicí. Své úkoly zvládl jen s malou včasnou pomocí pozemního střediska.
Ačkoliv se z předchozího textu může zdát, že dnes budeme psát pouze o robotu Bumble, není tomu tak. Simulovaný scénář závady představoval konec první fáze testů softwaru, který byl navržen pro autonomní činnosti operačních a robotických systémů kosmické lodi. Tento software se jmenuje ISAAC (Integrated System for Autonomous and Adaptive Caretaking). „ISAAC je mnohem víc než jen nástroj pro řízení našich robotických a kosmických systémů,“ říká Trey Smith, projektový manažer ISAAC z Ames Research Center v kalifornském Silicon Valley a dodává: „Naší dlouhodobou vizí je, že by mohl transformovat kosmickou loď na autonomní robotický systém.“
Zdroj: https://icdn.digitaltrends.com/
Budoucí mise programu Artemis k Měsíci a jednou i dál, dostanou člověka dál od Země, než kdy býval. Je logické, že si s sebou člověk vezme robotické a mechanické systémy. Na ISS, která je mnohem blíže domovu, se podařilo překonat hranici 20 let nonstop obydlenosti, což je něco, co v hlubším vesmíru ještě nějaký čas nebude možné. Jak ale budou budoucí stroje moci hladce fungovat bez neustálého lidského dohledu? ISAAC se snaží nabídnout technologii, která umožní vzdálenou autonomní správu během dlouhých časových období, kdy astronauti nebudou na palubě, aby mohli provádět údržbu, řídit logistiku a starat se o úkoly spojené s využíváním systémů. To samé platí i pro případy, kdy bude komunikace s pozemními dispečery omezená nebo prostě a jednoduše nedostupná.

Zdroj: https://upload.wikimedia.org/
Budoucí mise se budou vydávat dál a dál od Země. To znamená, že některé lodě a stanice (jako třeba Gateway) nebudou nonstop obydlené, jako jsme zvyklí u ISS. Zmíněná Gateway, která bude obíhat kolem Měsíce a bude také modelem pro budoucí mise k Marsu, má mít na své palubě lidskou posádku zhruba šest týdnů ročně, ale po celý rok bude potřebovat údržbu. Série demonstrací, které NASA provedla s programem ISAAC letos v létě a která vyvrcholila cestou robota Bumble, využívala systémy stanice i robotiku k autonomní práci s potenciálními scénáři, v nichž by NASA mohla chtít využít ISAAC na budoucích stanicích. Poslední zkouška představovala závěrečný milník první fáze testů ISAAC, ale další se již chystají. Cílem je dostat tuto technologii do stavu, kde by byla použitelná pro budoucí kosmické mise.

Zdroj: https://spectrum.ieee.org/
Tým projektu ISAAC nyní zahájil druhou fázi testů na palubě ISS. Tentokrát se pozornost zaměřuje na správu více robotů, kteří simulují přepravu nákladu mezi bezpilotní stanicí a připojenou bezpilotní nákladní lodí. Kromě zkoušek programu ISAAC s novými proměnnými tým přidal i vylepšené ovládací rozhraní, které má zjednodušit správu robotických systémů. Ve třetí a závěrečné fázi testů se chce tým pustit do ještě složitějších scénářů závad, které posunou možnosti robotických systémů až na jejich hranice. Hovoří se třeba o simulaci úniku vzduchu či požáru v útrobách stanice. Inženýři také chtějí vyvinout robustní postupy pro reakce na anomálie, které mohou nastat během reakcí na tyto simulované kritické situace.
Zdroj: https://www.nasa.gov/
Dnešní život na ISS je prakticky bez přerušení protkán neustálou komunikací – ať už mezi astronauty, roboty, staničními systémy, vědeckými týmy na Zemi a podobně. Pozemní týmy expertů mají na starost řízení harmonogramů těchto komplexních systémů, ale v budoucnu to bude jiné – až se NASA vydá do vzdálenějších končin, kde nebudou vždy poblíž k dispozici lidé. „ISAAC je klíčem k zajištění, aby stanice, jako je Gateway, fungovaly,“ říká Smith a dodává: „Čím dál půjdete do kosmu, tím chytřejší lodě a robotické systémy budeme potřebovat. Věříme, že ISAAC bude pomocníkem budoucích astronautů dokonce i když tam lidé přímo nebudou.“
Přeloženo z:
https://www.nasa.gov/
Zdroje obrázků:
https://project-orion-production.s3.amazonaws.com/…/4397/Jul20_Astrobee-Silo.jpg
https://icdn.digitaltrends.com/image/digitaltrends/iss059e0380841.jpg
https://upload.wikimedia.org/…%28ISS059-E-072476%29_%28cropped%29.jpg
https://spectrum.ieee.org/image/Mjg2MzMyNg.jpeg
https://www.nasa.gov/…/thumbnails/image/arc-astrobee-firstflight-stjacques-05.jpg






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}