I kapitáni vesmírných lodí potřebují navigátory a navigační systém. V posledních letech se intenzivně testuje možnost využití pulsarů pro účely vesmírné navigace. V minulém roce byly publikovány podrobnosti o testování této metody pomocí systému SEXTANT spolupracujícím s rentgenovým teleskopem na družici NICER. V nedávném článku jsem popisoval nejnovější výsledky přístroje NICER (Neutron star Interior Composition Explorer) pro studium rentgenového záření z vesmíru, který je umístěn na Mezinárodní vesmírné stanici ISS a je určen pro výzkum nitra neutronových hvězd právě pomoci rentgenového záření. Pozorováním nejtěžšího známého pulsaru PSR J0740+6620 se již podařilo nepřímo nahlédnout do nitra neutronové hvězdy a posoudit stlačitelnost jaderné hmoty v jejím centru. Součástí programu sondy je i projekt SEXTANT (Station Explorer for X-ray Timing and Navigation Technology) určený na testování vesmírné navigace s využitím pulsarů.

Zdroj: D. R. Lorimer, Living Rev. Relativity, 11 (2008) 8
Pulsary jako hodiny pro navigaci
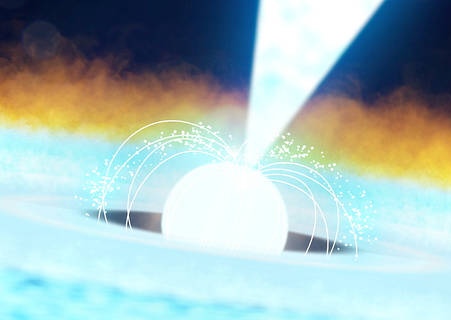
Pulsary jsou rotující neutronové hvězdy. Připomeňme, že emise záření vzniká interakci částic v extrémně silném magnetickém poli neutronové hvězdy. Interakce urychlených částic pak vede k emisi intenzivního směrovaného svazku elektromagnetického záření. Vzhledem k tomu, že magnetická osa není ve stejném směru, jako je osa rotace, mění se směr emise s rotací magnetického pólu neutronové hvězdy. Při rotaci pak neutronová hvězda zmíněným svazkem zasahuje periodicky objekty ve vesmírném prostoru v daném směru. Pokud tedy je v tomto směru Země, je periodicky zasahovaná záblesky elektromagnetického záření. V tomto případě pozorujeme tuto neutronovou hvězdu jako pulsar. Počty identifikovaných pulsarů už překročil dva tisíce.
Periody rotace se pohybují od jednotek milisekund až po jednotky sekund. Klasické pulsary mají periodu mezi desetinou sekundy až deseti sekundami. Specifickou skupinu mezi nimi tvoří právě milisekundové pulsary, které mají periody mezi 1,4 ms až 30 ms. Jejich počet už překročil dvě stovky. Tak rychlou rotaci nemůže kolaps konečného stádia hvězdy vznikající neutronové hvězdě předat. Odpovídající vysokou frekvenci rotace mohou získat pouze neutronové hvězdy nacházející se ve dvojhvězdě. Navíc se druhá komponenta dvojhvězdného systému musí nacházet v takové blízkosti k neutronové hvězdě a podobě, která umožňuje přetok hmoty z druhé hvězdy na tu neutronovou. Většinou tak k přetoku hmoty na neutronovou hvězdu dochází, když je normální hvězda ve stádiu rudého obra. Tímto přetokem se přenáší i moment hybnosti a rotace neutronové hvězdy se tak může i dramaticky zrychlit. A právě takové následné urychlení rotace neutronové hvězdy přetokem materiálu z jejího partnera ve dvojhvězdě může vést k milisekundovému pulsaru.
Rotace neutronové hvězdy, a tedy i pulsaru, je extrémně pravidelný a časově stabilní jev. Přesnost milisekundových pulsarů se blíží přesnosti atomových hodin, která se blíží řádu 10-17 s. Lze je tak využít pro časování. Přesnost určení frekvence pulsarů je v limitním případě v současné době u milisekundových pulsarů až v řádu 10-17 s. Jako příklad může sloužit pulsar PSR J0437−4715, který je nejbližším a nejjasnějším milisekundovým pulsarem. Nachází se ve vzdálenosti 510 světelných let. Jeho perioda je 0,00575745192436238 s a nejistota určení této periody je pouze 0,00000000000000005 s. Existují ještě nejméně dva další pulsary, jejichž přesnost určení periody a jejíchž stabilita se blíží přesnosti atomových hodin. Jsou to PSR B1855+09 s periodou 5,36 ms a PSR B1937+21 s periodou 1,557708 milisekundy.
Využití pulsarů k časování a určení polohy
Pulsary tak fungují jako velice přesné hodiny a milisekundové pulsary si svou přesností nezadají s atomovými hodinami. Binární systémy obsahující pulsar a další kompaktní objekt pak lze využívat pro testování obecné teorie relativity. Právě první binární systém obsahující pulsar a další neutronovou hvězdu, který v roce 1974 objevili R. A. Hulse a J. Taylor pomocí radioteleskopu Arecibo, pomohl získat první nepřímý důkaz o existenci a vyzařování gravitačních vln. Od té doby byla objevena celá řada kompaktních binárních systémů. Dnes už je jejich počet okolo stovky, přičemž u desítky z nich je druhým partnerem neutronová hvězda, podobně jako u pulsaru Hulseho a Taylora. Dokonce se podařilo najít i systém, kde je druhá neutronová hvězda také pulsar. Prvním takovým je dvojitý systém složený z pulsaru PSR J0737-3039A s periodou 23 ms a pulsaru PSR J0737-3039B s periodou 2,8 s objevený v roce 2003. Binární pulsary se staly extrémně citlivými laboratořemi na testování gravitačních teorií. Zatím všechna jejich stále přesnější pozorování potvrzují předpovědi Einsteinovy obecné teorie relativity. Ještě lepší pro taková studia by mohl být těsný systém pulsaru a černé díry, který se astronomové snaží také objevit.
Pulsary fungující jako velmi přesné hodiny však lze využít i pro určení polohy kosmické lodi. Jejich poloha je velmi dobře definovaná a zároveň od nich dostáváme velice přesný časový signál. Z časového posuvu u několika pulsarů v různých směrech, který vzniká posunem polohy a její souvislosti s rychlostí světla, lze určit polohu.
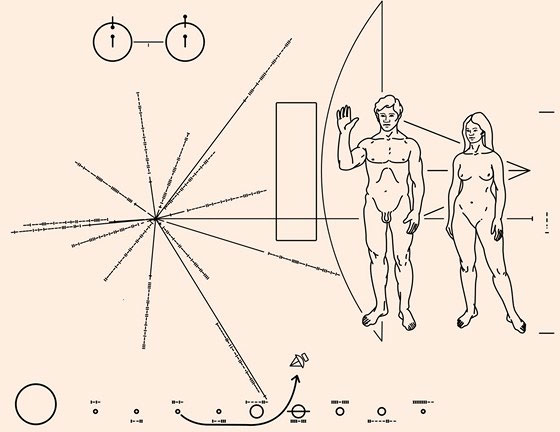
Možnost určení polohy Země v Galaxii pomocí pulsaru se využila i u destičky instalované na sondě Pioneer 10, která startovala v roce 1972. Ta byla určena pro případné mimozemské nálezce sondy v daleké budoucnosti. Na desce byl vyznačen směr ze Země ke galaktickému středu a také směry ke čtrnácti pulsarům, jejichž totožnost byla definována jejich frekvencí. Na základě změny vůči udaným periodám pulsarů způsobených prodlužováním jejich periody budou moci budoucí nálezci sondy určit i to, jaká doba uplynula od vypuštění sondy ze Země.
Vesmírná navigace pomocí pulsarů
Podívejme se, jak lze vesmírnou navigaci pomocí pulsarů konkrétně realizovat. Připomeňme, že GPS je založeno na družicích, které mají velice přesně definovanou polohu a zároveň mají velice přesné hodiny. Na družicích jsou to atomové hodiny. Poloha neutronové hvězdy je také přesně dána a jejími hodinami je samotný pulsar a jeho pravidelná rotace. Populární popis fungování družicového GPS systému je ve starším článku na Oslovi.
Zdroj: CAS
Nejjednodušší je detekovat rádiové vlny z pulsarů, tak byly také pulsary objeveny. Problémem pro využití radiových vln k navigaci je však potřeba velkých radioteleskopů pro jejich detekci. Ty opravdu nemohou být na každé sondě, která tuto navigaci potřebuje. To je důvod pro rozhodnutí, že v případě navigace pomocí pulsarů se využijí ty, které vysílají rentgenové záření a jeho detekce. Testovat takové zařízení je ovšem možné pouze ve vesmíru, protože toto rentgenové záření je pohlcováno zemskou atmosférou.
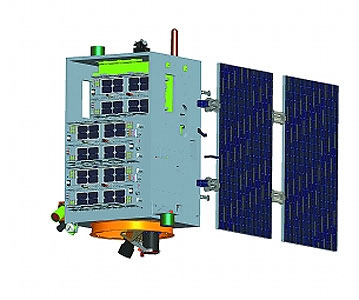
O možnosti využití milisekundových pulsarů pro zřízení galaktického navigačního systému se uvažuje už od počátku tohoto století, kdy se objevilo několik studií a návrhů. První testovací zařízení bylo vypuštěno z Číny. V listopadu 2016 odstartovala raketa Dlouhý pochod 11 s družicí pro testování navigace pomocí pulsarů XPNAV 1 (eXperimental Pulsar NAVigation satellite). Družice o hmotnosti zhruba 240 kg se pohybuje ve vzdálenosti okolo 500 km od povrchu Země. Úkolem sondy je proměřit co nejpřesněji charakteristiky 26 blízkých pulsarů a vytvořit databázi potřebnou pro realizaci vesmírné navigace založené na pulsarech.
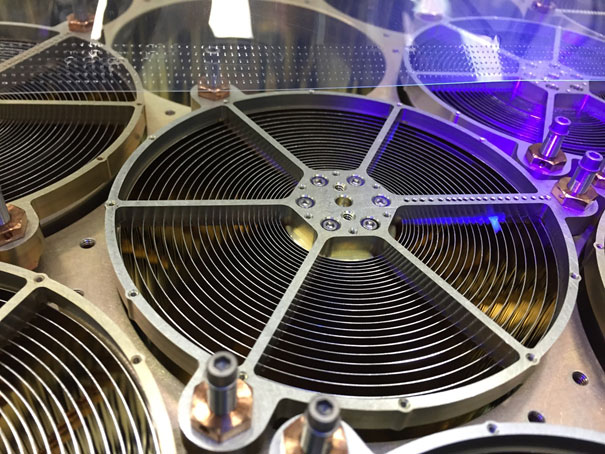
K tomu sonda využívá dvě zařízení pro detekci rentgenového záření. Prvním je detekční systém TSXS (Time-resolved Soft X-ray Spectrometer) využívající speciální Wolterovy čočky a křemíkový driftový detektor. Jeho časové rozlišení je 1,5 mikrosekundy. Druhý HTPC (High Time-resolution Photon Counter) je směrovaný detekční systém s kolimátorem a mikrokanálovou destičkou. Má menší časovou nepřesnost, která je do 100 nanosekund a větší sběrnou plochu. Přístroje jsou směrovány různými směry a nemohou být vzhledem k omezené kapacitě dodávky elektřiny provozovány současně, musí se střídat. Přesný čas zajišťují rubidiové hodiny kalibrované pomocí GPS.
Zdroj: Laboratory of Space Technology, Beijing
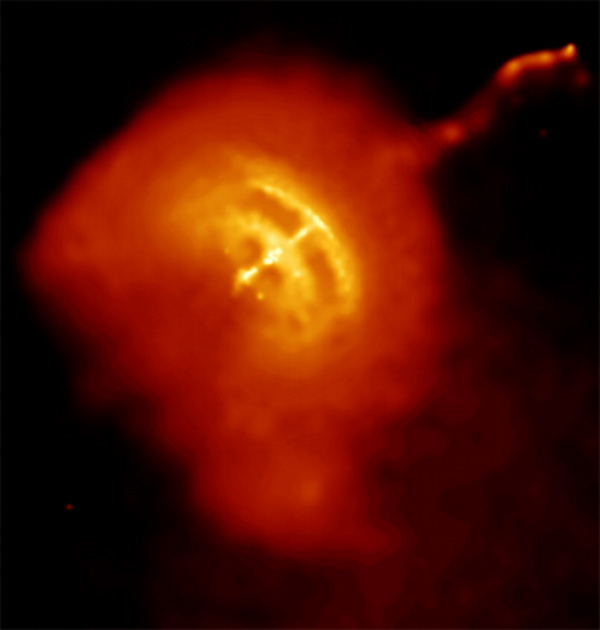
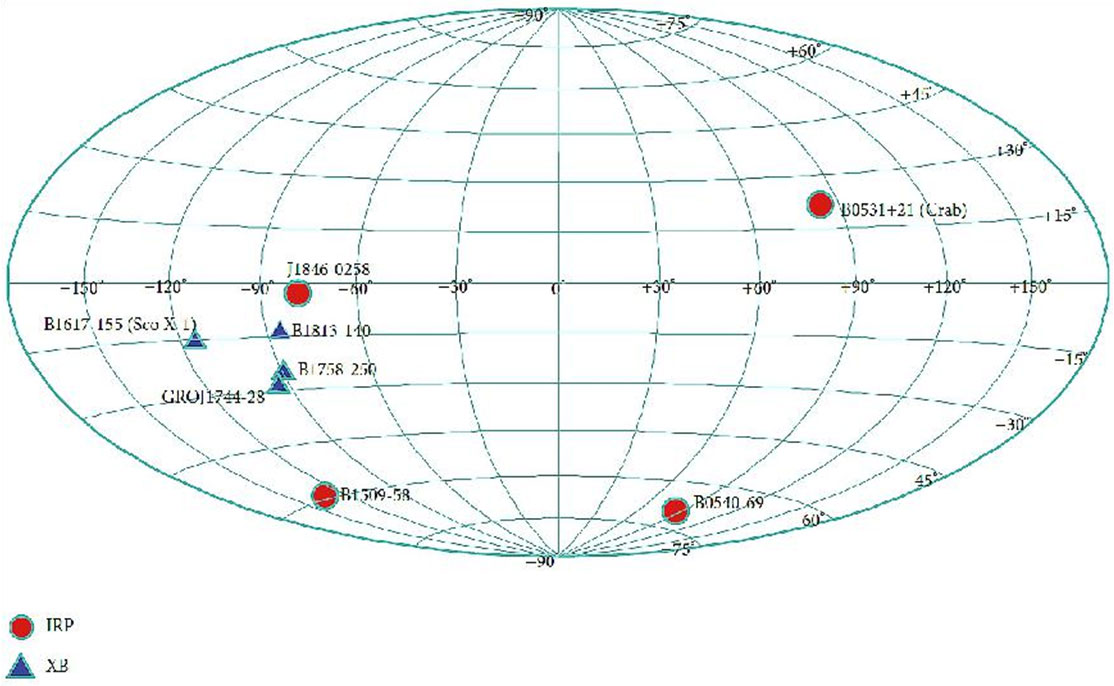
Jako výchozí cíle bylo vybráno osm pulsarů, které jsou velmi jasné v rentgenové oblasti elektromagnetického spektra. Mezi nimi je i známý pulsar v Krabí mlhovině. Šlo o osamělé pulsary, jako je třeba zrovna ten v Krabí mlhovině, ale také o binární pulsary. V první osmici bylo rozdělení do těchto dvou skupin půl na půl. Periody u vybraných pulsarů se pohybují od 3 do 500 milisekund.

Zdroj: X. Zhang et al, International Journal of Aerospace Engineering Vol. 2017, ID 8561830
V prvních měsících činnosti sondy se ověřila její funkčnost a kvalita přístrojů. Pozorovaly se tři pulsary a první testovací měření potvrdila předpokládané schopnosti přístrojů. Celkově by družice mohla fungovat pět až deset let.
Navigace pomocí pulsarů na vesmírné stanici ISS
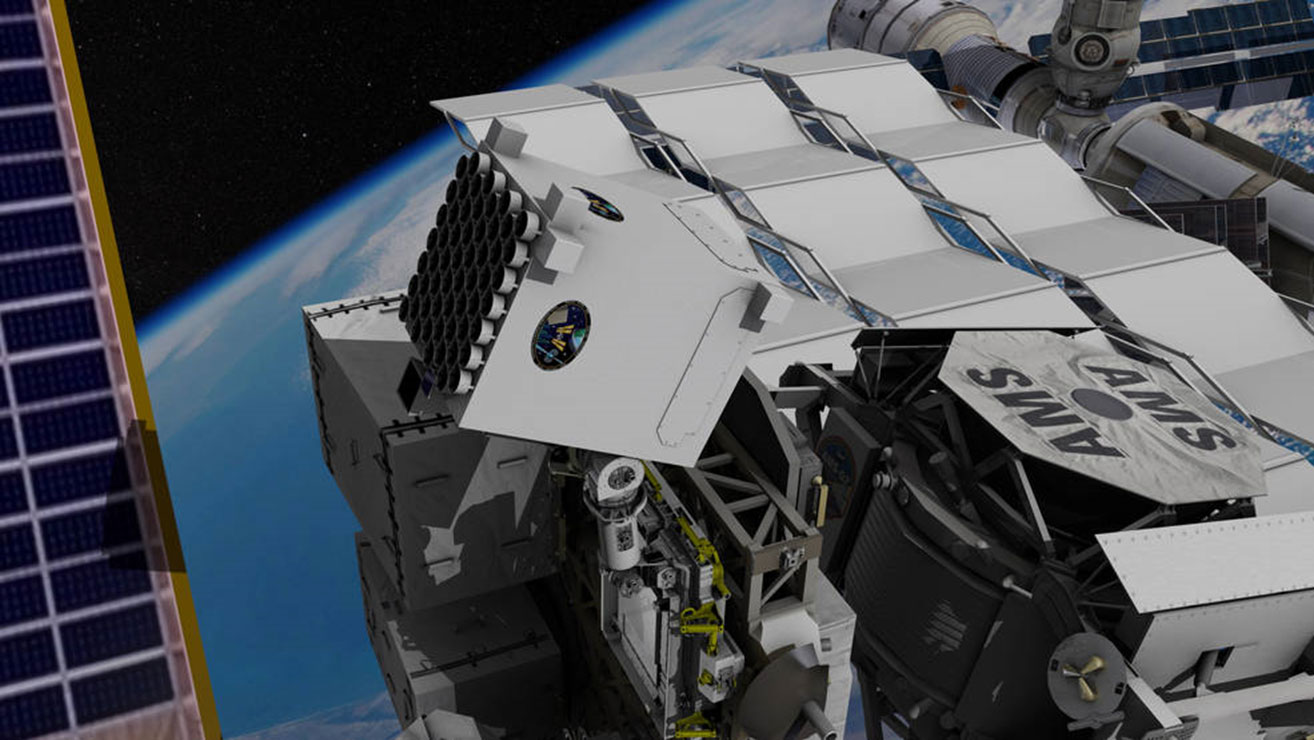
Zařízení NICER (Neutron star Interior Composition Explorer) je rentgenový dalekohled pro zkoumání měkkého rentgenového záření s energií mezi 0,2 až 12 keV z vesmírných objektů. Právě pro navigaci je opravdu důležité velmi dobré časové rozlišení u tohoto přístroje, který zároveň získává spektrum rentgenového záření. Je instalován na Mezinárodní vesmírné stanici ISS. Tam jej dopravila loď Dragon vynesená raketou Falcon 9, která startovala 3. června 2017.
Platforma, na které je dalekohled umístěn, umožňuje přesné zacílení a dlouhodobě umožňuje zkoumání celé oblohy. Zároveň zařízení testuje možnosti využít při navigaci ve vesmíru pulsary. Na to je zaměřen program označený jako SEXTANT (Station Explorer for X-ray Timing and Navigation Technology).
Rentgenový detekční systém NICER, kterým je XTI (X-ray Timing Instrument), je složen z 56 rentgenových „teleskopů“, které koncentrují fotony na křemíkové polovodičové driftové detektory. Ty určují čas a energii každého příchozího rentgenového fotonu. Na palubě je i GPS přijímač umožňující určení času a polohy. Optický systém pak umožňuje velice přesné a stabilní zacílení teleskopu směrem k vybranému zdroji rentgenového záření. Během jednoho oběhu stanice ISS, který trvá zhruba 90 minut, pozoruje rentgenový teleskop dva až čtyři objekty.
SEXTANT využívá data získaná popsaným modulárním rentgenovým teleskopem NICER, přičemž nenarušuje jeho vědecký program. Využívá je k tomu, aby demonstroval možnost reálné navigace pomocí pulsaru. Podrobnosti o architektuře tohoto projektu byly publikovány v článku z minulého roku.
Zdroj: NASA/Keith Gendreau
Pro první test se vybraly čtyři milisekundové pulsary J0218+4232, B1821-24, J0030+0451 a J0437-4715. Pozice získaná pomocí pulsarů byla srovnávána s polohou získanou pomocí GPS systému, který se také na stanici ISS nachází. Už při tomto krátkém dvoudenním experimentu se dosáhlo přesnosti určení polohy blížící se k deseti kilometrům. Po čtyřech týdnech pozorování se přesnost podařilo zvýšit až na 1,7 km.
Jak bylo zmíněno, dosahuje se velmi vysoké přesnosti určení času příletu rentgenového fotonu, nejistota je menší než 100 ns. Přesné měření času příchodů fotonů rentgenového spektra a srovnání s předpovězenými pro různé pulsary v různých směrech umožňuje z rychlosti světla určit velmi přesně polohu a její změny. Už v prvních dnech fungování se podařilo prokázat, že lze dosáhnout přesnosti určení polohy lepší, než je 10 km a brzy se podařilo přiblížit i k hodnotě jednoho kilometru. Projekt by tak mohl znamenat revoluci v navigaci našich výbojů ve Sluneční soustavě i za jejími hranicemi.
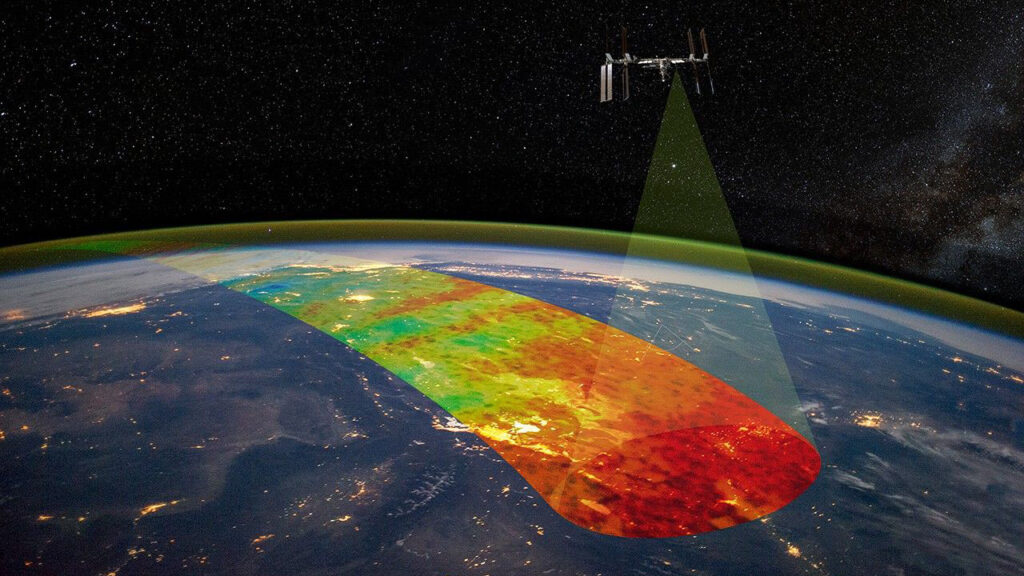
Zařízení NICER bylo určeno pro vědecké zkoumání rentgenova záření, a proto byla snaha o co největší jeho citlivost. I to byl důvod velkého počtu jeho modulů teleskopu. Pro vesmírnou navigaci by možná stačil jen jeden a hmotnost zařízení pro navigaci by tak byla jen okolo 5 kg. A to už opravdu není pro sondu, která se vydává na hranice Sluneční soustavy, tak velká zátěž.
Zdroj: NASA
Závěr
V budoucnosti se vědci a technici soustředí na zmenšení velikosti zařízení pro detekci rentgenova záření a zvyšování jeho citlivosti. To by mělo usnadnit jeho využití pro většinu misí, které se budou vydávat do vzdálenějších oblastí Sluneční soustavy. Vesmírné sondy i lodě by tak mohly určovat svou polohu nezávisle na spojení se Zemí. Jsou předpoklady, že by tento systém mohl být využíván i u vesmírných lodí Orion. Potenciálně je dosažitelná přesnost určení polohy až na desítky metrů.
Jak už bylo zmíněno, mohla by navigace pomocí pulsarů vyřešit nezávislé určování polohy nejen v naší Sluneční soustavě, a to i v těch jejich nejvzdálenějších oblastech, ale po celé galaxii. Pulsary jsou ve vzdálenostech větších než stovky světelných let, takže i v blízkém hvězdném okolí a při letech k nejbližším hvězdám, což budou dominantně rudí trpaslíci, a jejich planetám, bude možné využívat pro navigaci stejný katalog pulsarů, na kterém pracuje sonda XPNAV 1 i program SEXTANT na vesmírné stanici ISS. Tato metoda je řešením i pro jiné galaxie, kde se pulsary pochopitelně vyskytují také. Práce, které se tak nyní zahájily, jsou krokem k naší budoucí hvězdné expansi a mezihvězdné budoucnosti.
Psáno pro servery Kosmonautix a Osel.






Vynikajúci článok! A chcem oceniť aj výber témy…
Chápu, že ze změn přijímané frekvence z pulzarů lze zjistit vektor pohybu a na jeho základě novou polohu. S rostoucím časovým intervalem ale bude narůstat odchylka ve stanovení absolutní polohy, daná nepřesnostmi. Lze potom nějak lépe stanovit absolutní polohu za nějaký dlouhý interval letu ?
Tady jde o nepochopení. Nejde o zjišťování rychlosti pomocí změny frekvence, ale o posuny fází u pulsů různých pulsarů v různých směrech. které ukazuje na změnu vzdálenosti sondy od nich oproti vzdálenosti k nim v referenční poloze. Tedy přesně to, co se realizuje pomocí GPS. V případě využití většího počtu pulsarů, jejichž periody jsou nesoudělné, tak lze dokonce určovat i posun polohy daleko větší, než je vzdálenost, kterou urazí světlo za dobu jedné periody. A tedy určovat polohu opravdu nezávisle a i po výpadku systému.
U 1ms polsaru odpovídá puls délce 3000 km Takže zde lze bez problémů se pohybovat podle fáze. Ale jak to bude při výrazně větších vzdálenostech, pokud nebudu vědět, o kolik celých vln jsem se přesunul ?
Tam lze potom využít toho, že můžeme využít databázi více pulsarů a při zahrnutí do analýzy většího počtu než čtyř a zároveň s vědomím, že jejich periody jsou nesoudělné, můžeme z porovnání posunu jejich fází řešit i polohy, která způsobí posun i o vícenásobek jejich period. Pro určení posunu o větší vzdálenosti, lze také v prvním přiblížení použít sekundové pulsary, které definují velký rozdíl ve vzdálenosti a milisekundové pak pro konečnou přesnost.
Když už jsem u té přesnosti, tak pochopitelně i zde budeme narážet na problémy, které už se do článku nevešly. Kvůli struktuře neutronové hvězdy, dochází s jistou relativně velmi malou pravděpodobností u pulsarů pro nás zatím nepředvídaně ke skokům v periodě. Stejně jako pomalé prodlužování periody i tyto skoky budou muset být sledovány a doplňovány do využívané databáze pulsarů, která se vytváří.
Jasně, pokud budu kontinuálně ( s rozumnými rozestupy) sledovat polohu, je to O.K. a jsem schopen určit absolutní polohu. Co ale v případě, že nebudu delší časový interval měřit, potom se už k absolutní poloze nedoberu. Budu muset extrapolovat trajektorii z předešlých měření a od ní se odpíchnout.
Jediné co potřebujete, jsou přesné hodiny. Databáze pulsarů s jejich periodami a fázemi pro referenční polohu jsou dostatečné pro určení vaši polohy v prostoru. Pochopitelně v reálu je to složitější, ale znovu určení po výpadku není problém.
Je to v principu to samé jako u přesného určování polohy pomocí GPS (přesnost cca 1 cm), tam se nepoužívají časové značky (kódové měření) ale používá se fázové měření. U fázového měření se určuje celý počet vlnových délek + zbytek (doměrek) mezi přijímačem a družicí. Doměrek je jednoduché změřit, celý počet vlnových délek ale ne.
U GPS se využívá toho že tu máte i to kódové měření takže polohu s přesností několik metrů získáte z toho kódového měření a řešíte přesnou polohu (a čas) v tomto prostoru. Vezmete-li měření ze 4 družic vyjde vám v tom několikametrovém prostoru třeba 10 výsledků, přidáte-li 5. družici do výpočtu tak ta se bude rozcházet řekněme v 8 případech a zbudou nám třeba jen 2 řešení možné polohy, stačí přidat měření z dalšího satelitu a počet řešení v daném prostoru se zase zmenší.
U pulsarů můžete použít stejnou metodu s několika drobnými modifikacemi. GPS mají všechny stejnou frekvenci takže přesnost u všech satelitů je daná stejně, kdežto pulsary mají každý svou frekvenci. U GPS díky kódovému měření víme poměrně přesně kde jsme a pomocí fázového měření jen upřesňujeme. U pulsarů si musíme pomoci jinak, například tím, že víme že jsme ve vnitřní sluneční soustavě vymezenou například drahou Jupiteru. Vezmete pulsary s nejmenší frekvencí a určíte polohu -> několik řešení -> přidávámeme další pulsary dokud není řešení jen jedno. Nyní víme kde jsme, ale souřadnice jsou dost nepřesné. Můžeme ale zpřesnit polohu pomocí pulsarů se střední frekvencí (už víme kde jsme tak těch řešení nebude tak strašně moc) a nakonec to zopakujeme s pulsary s nejvyšší frekvencí – přesností.
Pokud nemůžete přidat další satelity nebo pulsary a nemáte stále jediné řešení, stačí jen chvíli počkat jak se pohybují satelity (u GPS) nebo jak se pohybuje sonda (u pulsarů) tak se některé řešení „rozjedou“ a zmizí a naopak začnou vycházet jiné nové řešení, ale po chvíli zbude pouze jediné řešení které je platné po celou dobu měření.
Teď jsem uváděl příklad jen pro sluneční soustavu, ale co třeba navigace u mezihvězdných sond? Tam už těch možných výsetků bude tolik že výše zmíněný postup nebude fungovat. Tam si budeme muset s počáteční polohou poradit jinak, třeba tak, že budeme pozorovat posuny blízkých hvězd na vzdáleném hvězdném pozadí a z toho určit přibližnou polohu a až potom určovat pomocí pulsarů.
Má to jedno kouzlo, budeme tak schopni určovat svou polohu na orbitě Země stejně přesně jako na orbitě exoplanety a vlastně tak i přesně změřit vzdálenost.
Použil jsem několik zjednodušení, GPS nevysílají fázově jen na jedné frekvenci, ale na dvou či více (a ty frekvence nemají společného dělitele, takže jde použít jejich násobek), dále předpokládám že pulsary s vyšší frekvencí máme i přesněji určené (což nemusí být pravda, potom by odpadly kroky s těmi pulsary s vyššími frekvencemi).
Já bych k diskuzi výše přidal ještě jednu poznámku: poloha družic a sond se neurčuje tak, že by bylo třeba stanovit z ničeho nic polohu sondy, která vůbec netuší, kde je (ne že by to nešlo, ale v praxi se to tak neděje).
Od samého vypuštění sondy máme k dispozici nějaké údaje – počáteční polohu a vektor rychlosti. Z nich se provádí výpočet budoucí trajektorie a dalšími měřeními se takto spočtené polohy ověřují a zpřesňují.
Puls ms pulsaru dá sice více „poloh“ (vzdáleností), lišících se od sebe o 3000 km, ale pokud nejistota v poloze sondy nenarostla mezitím na hodnotu srovnatelnou s touto vzdáleností, tak pouze jedna z takto určených poloh bude kompatibilní s vypočtenou trajektorií, a zbytek řešení lze zahodit.
Omlouvám se, že plním funkci gramatické policie, ale dovolím si upozornit na částý nešvar. Správný budoucí čas od slovesa soustředit se je buďto dokonavý „soustředí se“, nebo nedokonavý „budou se soustřeďovat“, typicky se používá dokonavý tvar. (Doufám, že mě někdo nepřeveze a neodpoví mi, že existuje nějaké nové pravidlo, které to dovoluje. Pak bych si musel jedine pomoci citátem z povídky A.C. Clarka Ticho prosím! „Pochybuju, že takové slovo existuje, a jestli ano, tak by nemělo.“)
Opraveno, díky.