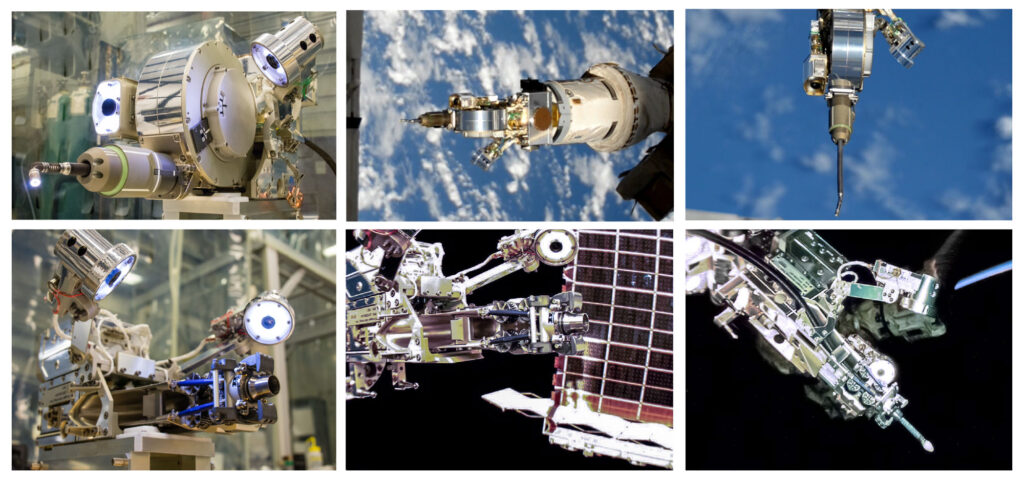
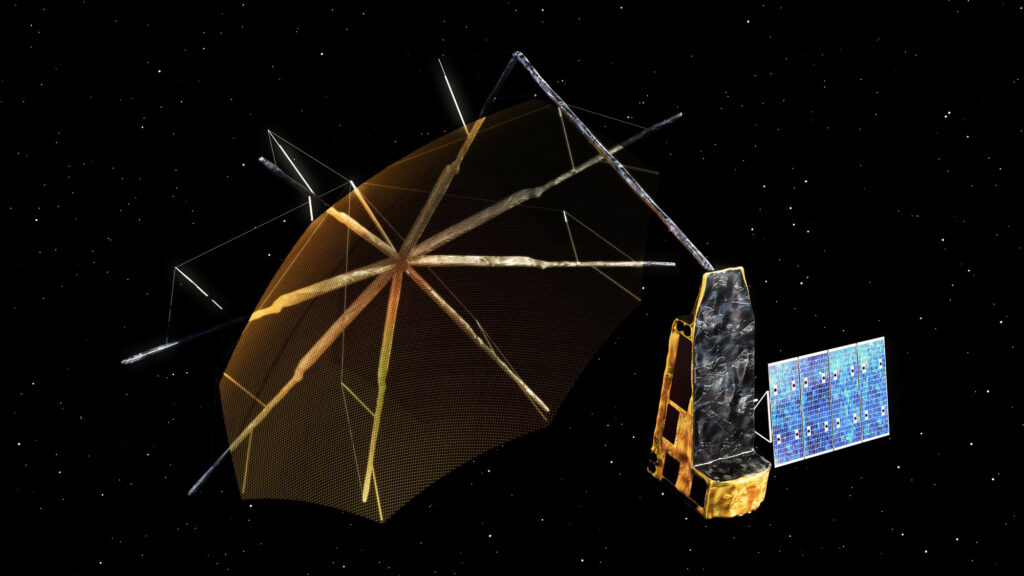
Americký projekt RRM3 (Robotic Refueling Mission 3) úspěšně dokončil svou druhou sadu činností s robotickými nástroji. Na Mezinárodní kosmické stanici vyzkoušel klíčové technologie nutné k přečerpávání kryogenních látek, které se dají využít jako chladicí médium, pohonná látka nebo jako součást systémů podpory života. Vyzkoušené technologie půjde využít i v projektech, které mají prodloužit životnost družic, ale podpoří i cesty k Měsíci či Marsu. Mezi 19. a 22. říjnem se RRM3 s pomocí staničního manipulátoru Dextre podařilo propojit více než tři metry dlouhou hadici s kryogenním ventilem, přičemž systém neustále kontroloval správnost spojení.
Zdroj: https://www.nasa.gov/
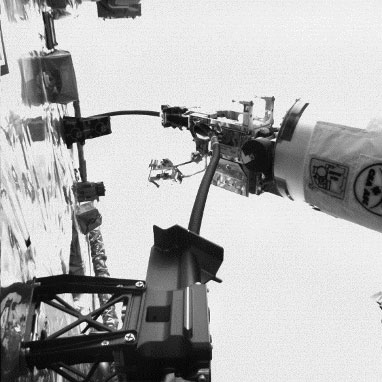
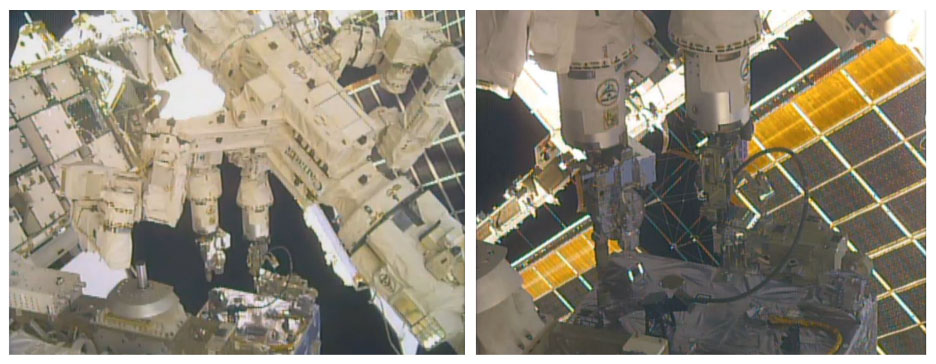
Možná se to nezdá jako velká věc, ale bylo to poprvé, kdy Dextre držel v obou svých pažích nějaký nástroj. Součástí RRM3 byla jak hadice s robotickými nástroji, které symbolizovaly budoucí servisní družici, tak i ventil a trubky, které zase symbolizovaly družici, která potřebuje doplnit nádrže. Dextre při této demonstraci souběžně pracoval se dvěma nástroji – CST (Cryogen Servicing Tool) pro vlastní manipulaci a VIPIR2 (Visual Inspection Poseable Invertebrate Robot 2) pro vizuální kontrolu. Jedna paže držela nástroj CST, který byl potřeba k zachycení hadice a její navedení k ventilu. Druhá paže zasunula hadovitou kameru VIPIR2 do potrubí, aby bylo jisté, že byla hadice vložena správně.
Projekt RRM3 byl na oběžnou dráhu dopraven v prosinci roku 2018 a první sadu robotických činností dokončil v srpnu 2019, kdy prověřil správné fungování svých nástrojů a systém adaptéru pro hadici, který je vhodný pro robotickou manipulaci. Zařízení potkala v loňském roce závada – systém chlazení kapalného metanu vypověděl službu a kryogenní kapalina se začala ohřívat a měnit v plyn. Z bezpečnostních důvodů proto došlo v dubnu k jeho vypuštění. I tak šlo o rekord – kryogenní kapalina nikdy nebyla v kosmickém prostoru uchovávána delší dobu bez úniků.
Zdroj: https://www.nasa.gov/
Přeloženo z:
https://www.nasa.gov/
Zdroje informací:
https://www.nasa.gov/sites/default/files/thumbnails/image/rrm3_ops_merged_high_res.png
https://www.nasa.gov/sites/default/files/thumbnails/image/rrm3_image_4.png
https://www.nasa.gov/sites/default/files/thumbnails/image/rrm3_image_2.png







{kind=link}
{kind=link}
{kind=link}