
Vím, že když vyšel minulý díl seriálu Pohled pod kůži, sliboval jsem, že v dalším bude řeč o vědeckých přístrojích na sondě Juno. Tento plán vzal za své, když na webu spaceflight101.com vyšel článek o konstrukci čínské automatické zásobovací lodi Tiančou, jejíž start by měl přijít v nejbližších dnech. Z hlediska aktuálnosti tohoto atraktivního a zajímavého tématu jsme tak změnili plánované pořadí dílů v seriálu Pohled pod kůži, ale doufáme, že našim čtenářům tato neplánovaná změna nebude vadit.
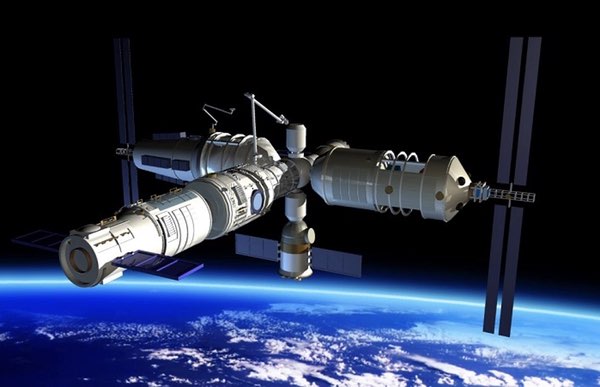
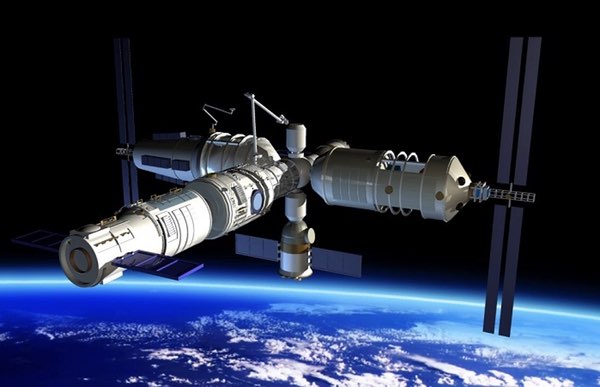
Tiančou (v anglickém přepisu Tianzhou) znamená v češtině nebeská loď a tohle označení se používá pro automatickou zásobovací loď, která by měla obsluhovat a zásobovat čínskou modulární kosmickou stanici, jejíž stavba začne už v příštím roce. Tato stanice se někdy označuje jako Tiangong 3, jindy jako CSS (China Space Station) a víme o ní, že by ji měl tvořit velký centrální modul a nejméně dva moduly vědecké. Na stanici má pobývat tříčlenná posádka a pobyty mají trvat až půl roku. Stanice samotná má na oběžné dráze fungovat zhruba deset let, takže bude potřeba zajistit jí důkladné zásobování – ať už z hlediska doplňování pohonných hmot, ale i co se týče zásob pro posádku a vědeckých experimentů.
Zdroj: http://spaceflight101.com
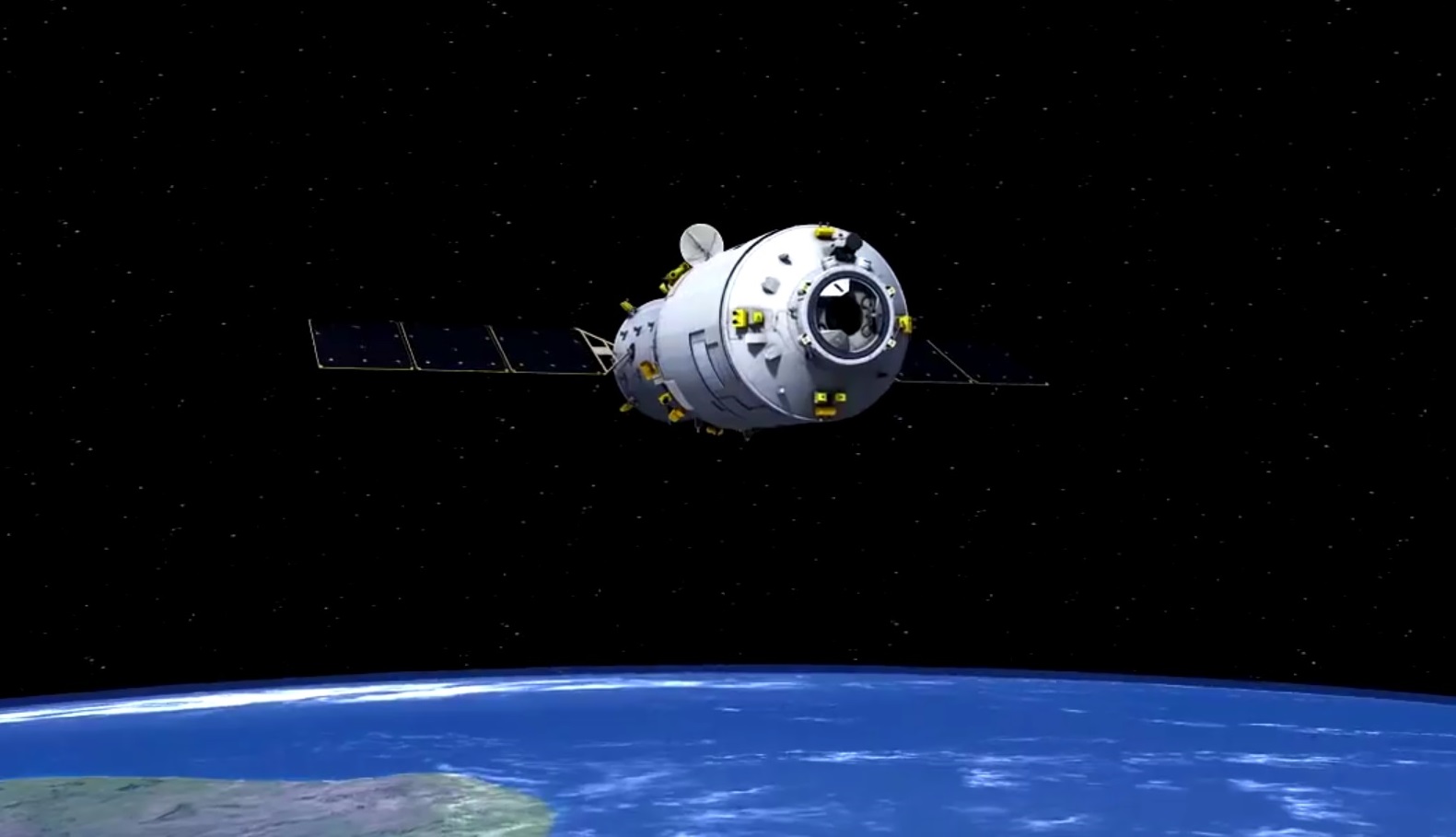
Loď Tiančou je konstrukčně velmi podobná jednomodulovým stanicím Tiangong, které byly vypuštěny v letech 2011 a 2016 jakožto předstupně chystané modulární stanice. Testovaly se na nich nejrůznější operace, které budou na nové stanici velmi důležité – automatické dokování, kontrola systémů podpory života, logistika s nákladem a palivem, nebo pobyt tajkonautů.

Zdroj: http://spaceflight101.com
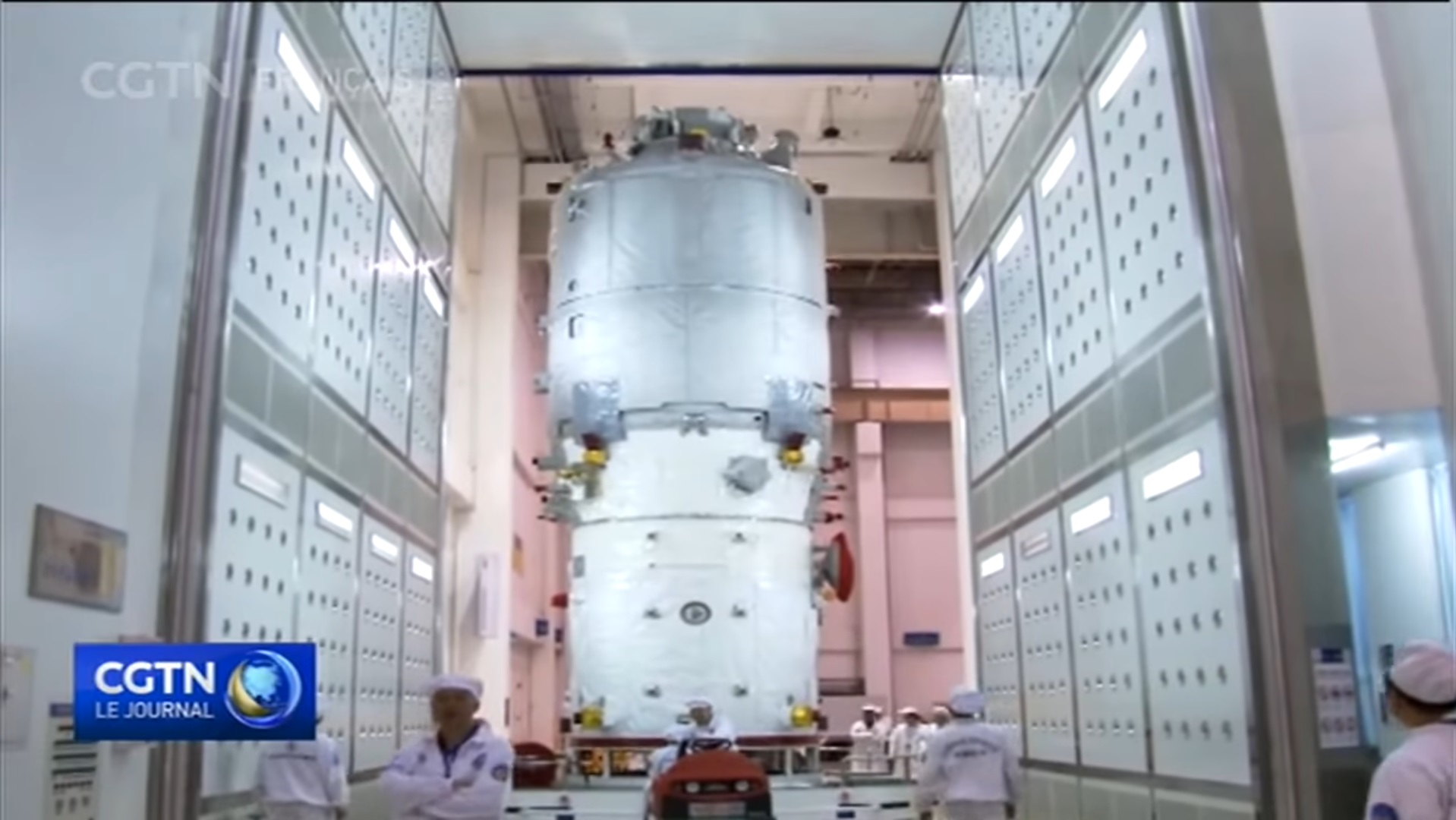
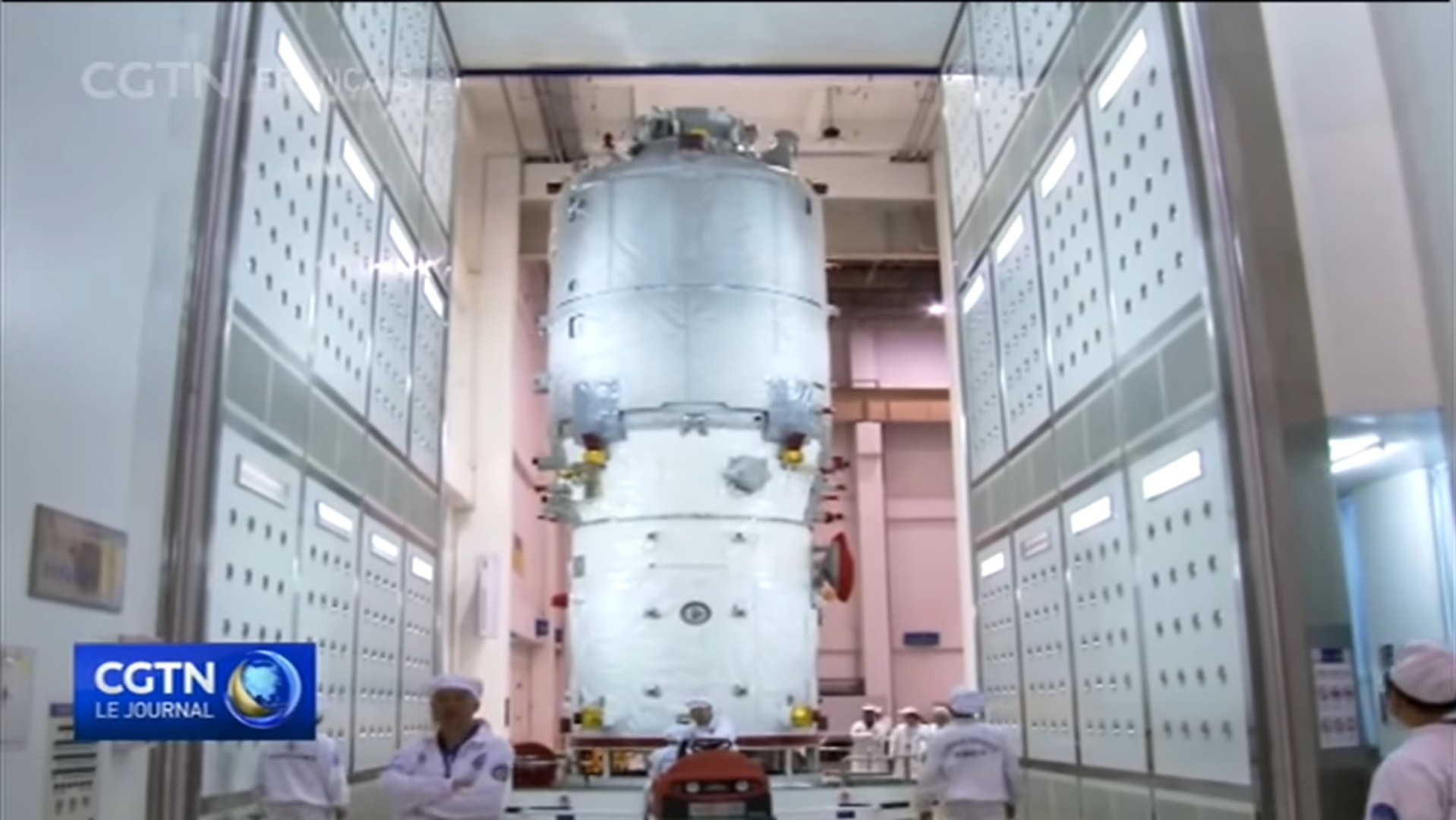
Loď Tiančou byla navržena tak, aby mohla dopravovat náklad v hermetizované, polohermetizované i nehermetizované sekci, což zajistí schopnost dopravy všech typů nákladu. Loď bude startovat z kosmodromu Wenčang na ostrově Hainan na nové čínské raketě Dlouhý pochod 7, která si svou premiéru odbyla vloni. Jak již bylo uvedeno výše – loď Tiančou je velmi podobná laboratořím Tiangong. Také její stavba vychází ze tří základních bloků – Servisního modulu v zadní části, kde se nachází pohonné a elektrické systémy, transfer modul a přetlaková sekce zakončená dokovacím systémem v přední části lodi.
Zdroj: http://spaceflight101.com
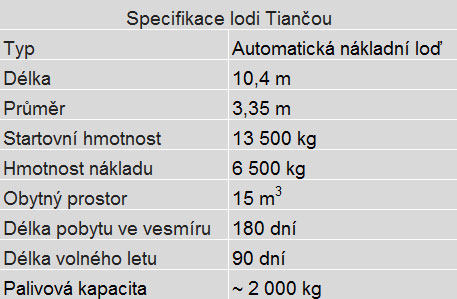
Celá loď měří na délku 10,4 metru, přetlaková část má průměr 3,35 metru, zatímco servisní modul má jen průměr 2,8 metru. V prázdném stavu váží Tiančou 7 tun a může pojmout náklad o hmotnosti až šest a půl tuny, což je omezeno nosností použité rakety Dlouhý pochod 7. Provoz lodi zajišťuje čínská kosmická agentura CNSA a o stavbu se postarala Čínská akademie kosmických technologií (CAST).
Spojení lodi se stanicí bude probíhat v autonomním režimu a loď je certifikována pro několikaměsíční pobyt ve vesmíru. Po odpojení od stanice loď shoří v atmosféře. Tiančou by ale mohla být schopna až tři měsíce dlouhého pobytu na oběžné dráze bez připojení ke stanici, což by teoreticky šlo využít pro nejrůznější vědecké experimenty.

Zdroj: http://spaceflight101.com
První let lodi Tiančou je plánován jako pětiměsíční, přičemž cílovým tělesem bude kosmická laboratoř Tiangong-2. Zásobovací loď se v rámci zkoušek připojí k modulu Tiangong-2 hned třikrát a pokaždé přenese část paliva do nádrží Tiangongu. Právě přečerpávání paliva patří ke kritickým zkouškám, které budou klíčové pro provoz větší stanice.
Zdroj: http://spaceflight101.com
Překlad: Autor
Druhý exemplář lodi Tiančou má zamířit v roce 2018 k prvnímu vypuštěnému modulu Tianhe. Ten bude disponovat dvěma dokovacími porty a tak bude možné, aby se k němu připojila jak loď Tiančou se zásobami, tak i loď Šenčou s posádkou. Jakmile se rozjede provoz na čínské stanici, budou lodě Tiančou a Šenčou udržovat její provozuschopnost.
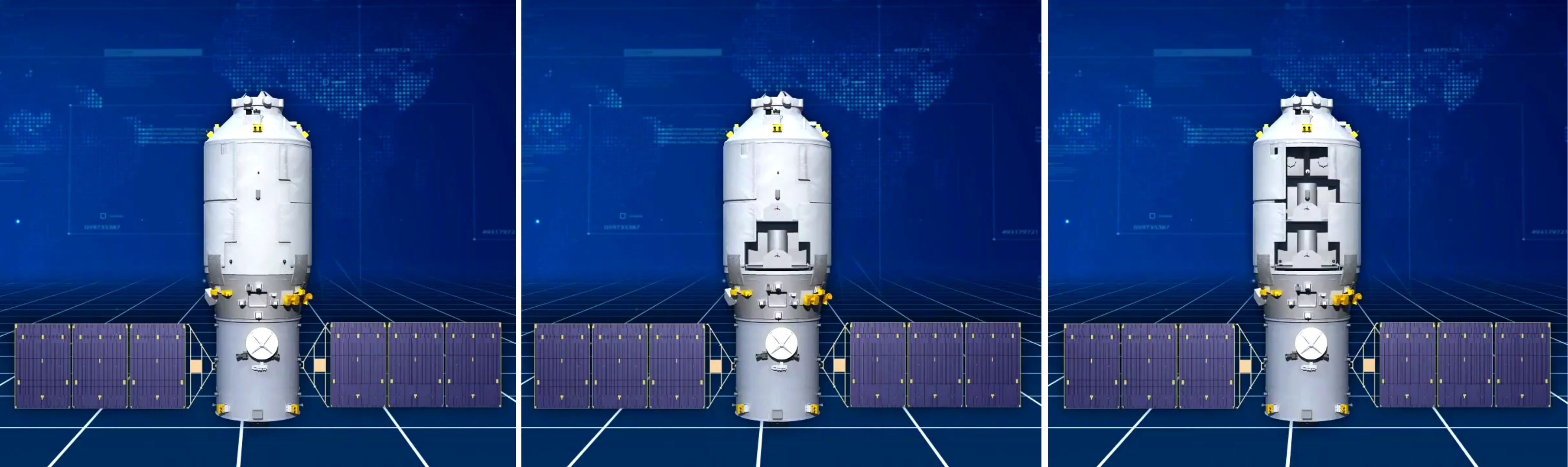
Loď Tiančou může startovat hned ve třech různých konfiguracích. První z nich představuje plně hermetizovanou verzi s nákladem o hmotnosti 6500 kg. Druhou verzi můžeme označit jako polohermetizovanou. Ta bude mít menší přetlakovou kabinu a kromě ní dostane i nehermetizovanou nákladovou sekci, jako to známe z japonské lodi HTV. Třetí verze se označuje jako nehermetizovaná – ta nebude mít přetlakovou kabinu a bude schopna dopravit náklad o rozměrech 4 × 3 metry a hmotnosti 5 tun. Podobně jako v případě již zmíněné HTV by se náklady z nehermetizované sekce překládaly pomocí staničního ramene.

Zdroj: http://spaceflight101.com
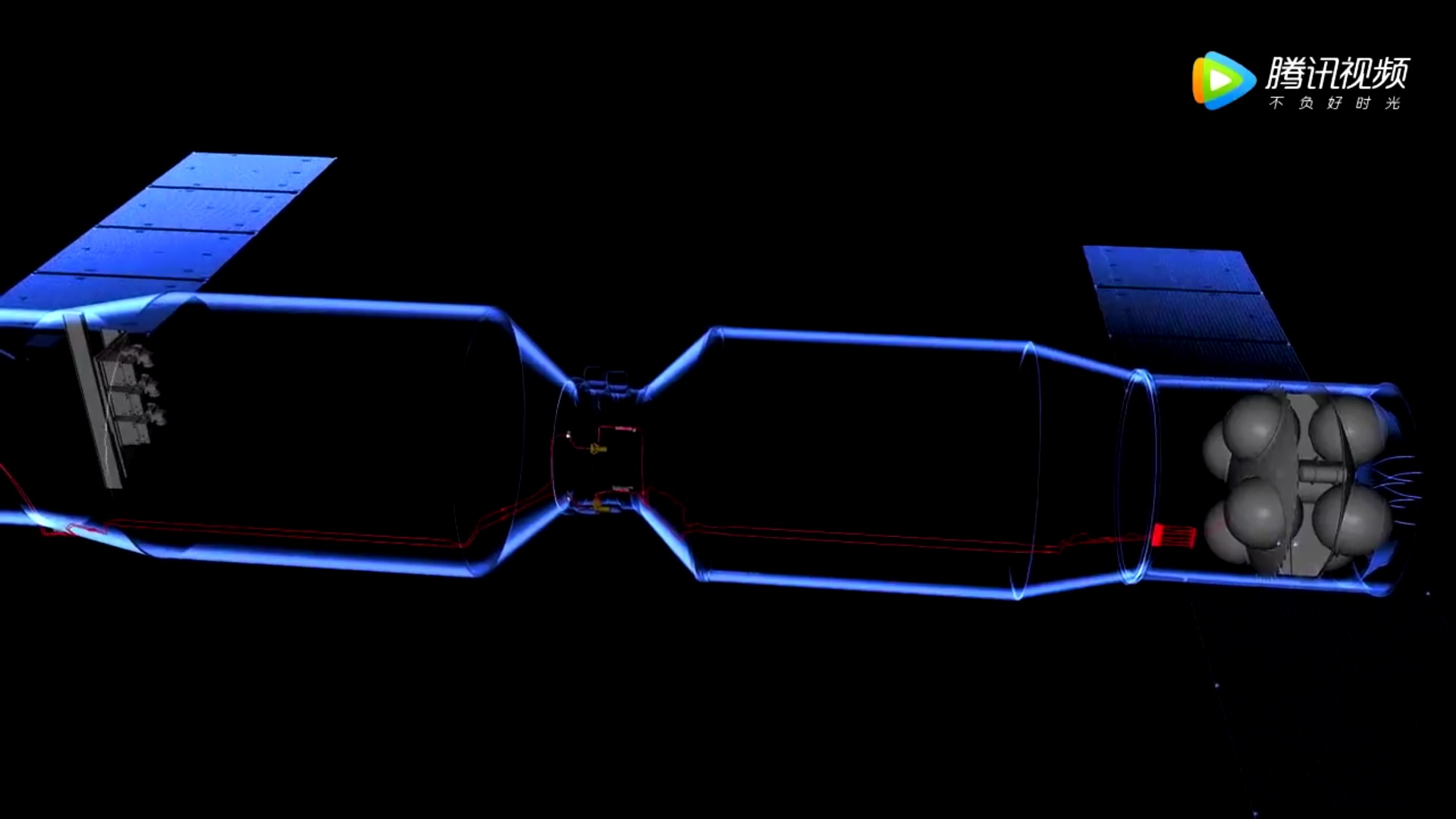
Servisní modul
Servisní modul lodi Tiančou je podobný servisnímu modulu stanice Tiangong. Najdeme v něm pohonné systémy, ale i systémy, které zajišťují dodávky elektrické energie a mnoho dalších subsystémů zajišťujících správnou funkci lodi. Jsou tu ale i rozdíly – především jde o jiný počet palivových nádrží a výkonnější pohonný systém. To vše se podepsalo na zvýšení hmotnosti Tiančou oproti Tiangong-2 o 60%.

Zdroj: http://spaceflight101.com
Servisní modul měří na délku 3,3 metru a jeho průměr je 2,8 metru. Najdeme v něm trysky hlavního pohonného systému, ale i korekční trysky pro udržování orientace. O dodávky energie se stará dvojice solárních panelů, které jsou při startu přiloženy k tělu lodi. Tím se vysvětluje, proč má servisní modul menší průměr, než modul přetlakový – je potřeba nechat rezervu pro složené solární panely.
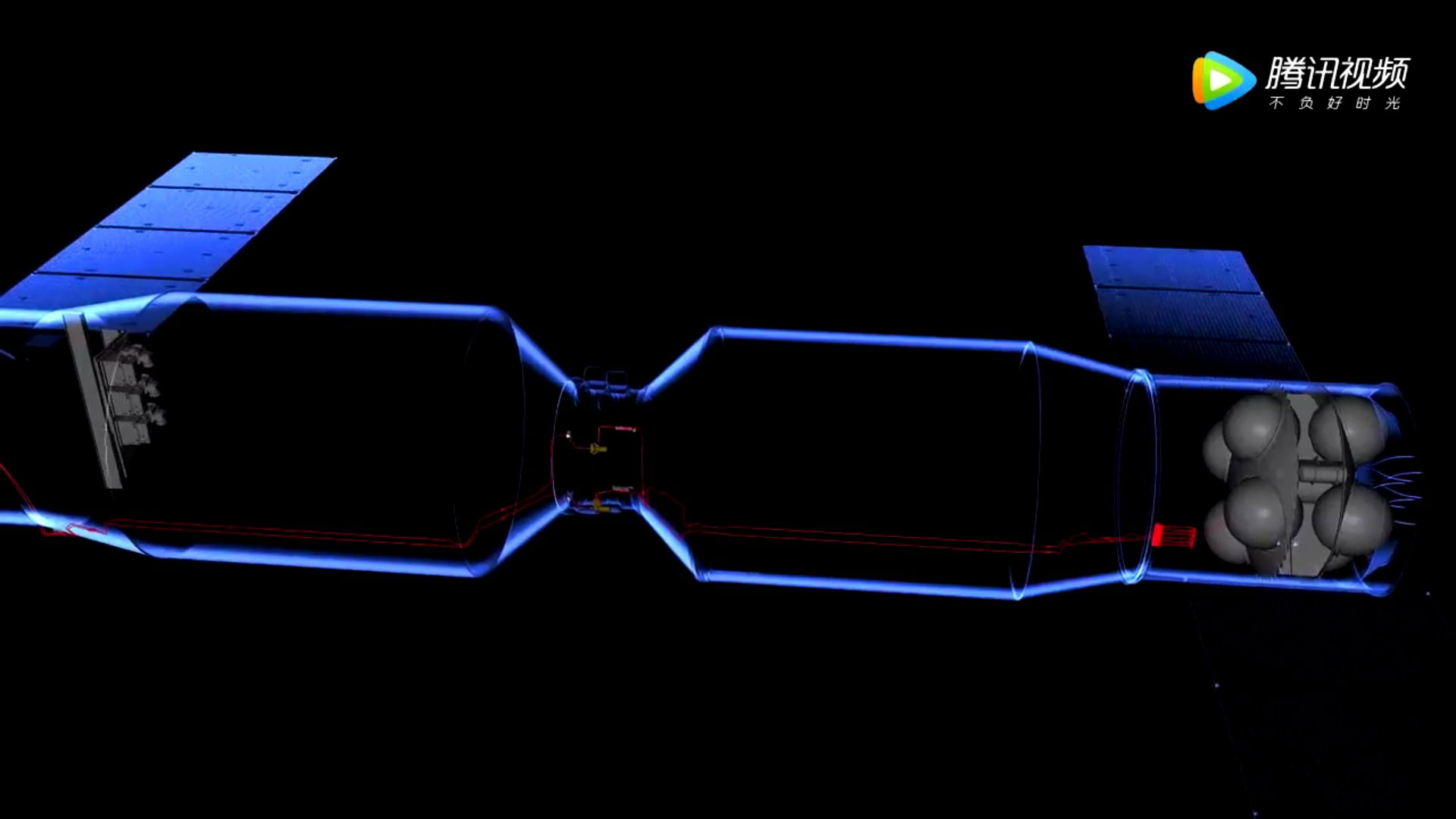
Pohonný systém bude spoléhat hlavně na čtyři hlavní motory s tahem 490 N. Jedná se o technologii odvozenou od čínských misí Chang’e určených k výzkumu Měsíce. Tyto hlavní motory se budou starat o manévry, kde je potřebná velká změna rychlosti – může jít o vytahování stanice na vyšší oběžnou dráhu, ale i o brzdící manévr pro vstup do atmosféry. Pro lehké korekce je určeno osm malých Vernierových trysek.
Palivo je uskladněno v osmi kulovitých nádržích, které jsou podle dostupných zpráv podobné těm, které se používají v lodích Šenčou, kde pojmou 230 litrů paliva. Tiančou bude na stanici vozit dvousložkové hypergolické palivo – monometylhydrazin a oxid dusičitý – pochopitelně v oddělených nádržích. Celkem má jedna loď pojmout až dvě tuny paliva a okysličovadla.

Zdroj: http://spaceflight101.com
K udržování orientace poslouží série trysek s tahem 150 N. O klonění a vybočení (v angličtině Pitch a Yaw) se postarají čtyři páry trysek, zatímco klopení (ang. Roll) a jemné korekce zajistí osm malých trysek ve spodní části servisního modulu. Co se orientace v prostoru týče, loď Tiančou bude hlavně spoléhat na hvězdy. Použije k tomu zdvojené sledovače hvězd, které nasnímají hvězdnou oblohu a porovnají ji s palubním katalogem jasných hvězd. Z těchto údajů se pak dá vypočítat orientace ve všech třech osách. Inerciální měřící systém přijde ke slovu při některých manévrech a na palubě najdeme i sluneční senzory, které poslouží jako záloha pro případ přechodu do bezpečného režimu.
Každý ze dvou solárních panelů je tvořen třemi díly, přičemž celková plocha je více než 24 metrů čtverečních. Solární buňky jsou na bázi galium-arsenu a v maximálním osvitu generují až 4500 W, přičemž průměrně se počítá s 1900 W. O správné natočení panelů vůči Slunci se postarají malé sluneční senzory. Vytvořená energie se následně uloží do Ni-MH baterií, které pojmou až 40 ampérhodin. Elektronika na plaubě pracuje s napětím 100 V, které je udržováno v rozpětí 98 – 103 V. Některé systémy jsou vybaveny DC/DC konvertory, které snižují napětí na 28, nebo 12 V.

Zdroj: http://spaceflight101.com
Datový systém lodi Tiančou využívá standardizovanou sběrnici MIL STD 1553 pro interní přenos příkazů a dat o stavu systémů. Ke komunikaci poslouží pásmo S, ve kterém se bude posílat telemetrie a pásmu Ku, které bude určené pro odesílání vysokoobjemových balíčků. Počítá se třeba s videem z připojování ke stanici – data by přitom měla putovat přes retranslační družice systému Tianlian na geostacionární dráze, jejichž signál pokrývá celou oběžnou dráhu lodi.
Spojnicí mezi servisním a přetlakovým modulem je transfer modul, který měří sotva jeden metr na délku. Má kónický tvar a zajišťuje plynulý přechod z průměru 2,8 metru na 3,35 metru. Vnitřní strukturu tohoto modulu neznáme, ale předpokládá se, že zde budou uloženy třeba nádrže se stlačenými plyny pro udržování dýchatelné atmosféry v přetlakové kabině, nebo nádrže s vodou.
Přetlakový modul
Tato část se může někdy nazývat též orbitální modul, ale jedná se o stejný díl. V tomto prostoru o vnitřním objemu až 15 metrů krychlových může být uložen jakýkoliv náklad. Na čtyřech stěnách jsou umístěné nákladní racky, které mohou být vyplněny balíky se zásobami, případně nejrůznějšími kontejnery. Dodatečný skladovací prostor je k dispozici ve spodní části modulu.

Zdroj: http://spaceflight101.com
Na vnější části můžeme najít velký radiátor, který vyloučí až 2 kW tepla ze servisního a přetlakového modulu. O transport tohoto tepla k radiátoru se postará sestava trubiček, ve kterých bude cirkulovat chladící kapalina.
Přední části přetlakového modulu dominuje dokovací mechanismus založený na principu APAS o průměru 1,4 metru. Jsou do něj integrována datová a elektrická rozhraní, ale i konektory pro transport kapalin a tlakovacích plynů. Podle dostupných zpráv by měla loď Tiančou používat duální palivový systém – ten by umožňoval, aby veškeré palivo, které není nutné pro primární misi, bylo přečerpáno do nádrží stanice. Tato architektura má umožnit efektivnější využití zdrojů ve srovnání s oddělenými systémy.
Zdroj: http://spaceflight101.com/
Název systému APAS pochází z anglického Androgynous Peripheral Attach System a podobné systémy se používaly už při spojování lodi Sojuz a Apollo. Používaly je také americké raketoplány během připojování ke stanici Mir a využití našly i při stavbě ISS. Na rozdíl od mechanismu sondy a kužele, který používají Sojuzy je APAS tvořen dvojicí identických dokovacích mechanismů. Díky tomu může kterýkoliv prstenec APASu zajistit spojení s libovolným jiným APASem.

Zdroj: http://spaceflight101.com
Během připojování je jeden APAS konfigurován do aktivního režimu (většinou na přilétající lodi), zatímco druhý je v módu pasivním, kdy je dokovací prstenec zatažený. Prstenec ukrývá vodící prvky, které v okamžiku kontaktu zarovnají obě části tak, aby západky na aktivním prstenci zapadly do západek v prstenci pasivním, což zajistí měkké spojení. Po kontaktu ještě chvíli trvá, než ustanou všechny pohyby – poté je možné přitáhnout oba prstence těsně k sobě. Vytažený prstenec na aktivní straně se zatáhne a vše pojistí ještě 12 zajišťovacích kolíků, které se postarají o vzduchotěsný kontakt.
Samotný přibližovací systém na lodích Tiančou a stanicích Tiangong je založený na několika senzorech, které vedou aktivní loď ke kosmické laboratoři, která plní pasivní úlohu. Už ve vzájemné vzdálenosti 50 kilometrů se aktivuje radarový systém na bázi UHF, který zajistí relativní navigaci. Komunikace mezi oběma tělesy spočívá ve výměně navigačních dat, která pomohou oběma stranám najít svůj protějšek.
Na bližší vzdálenost přijde ke slovu přesnější systém na bázi laseru. Ten má měřit nejen vzdálenost, ale i rychlost přibližování. Použije se i elektrooptický systém, který dodá informace o relativní geometrii mezi tělesy. Během přibližování loď uskuteční plánovaná zastavení ve vzdálenostech 5 kilometrů, 400 metrů a nakonec 140 metrů od stanice.
Pokud bude vše v pořádku, bude vydán pokyn k závěrečnému přiblížení. Pozemní středisko by do celého procesu mělo zasahovat jen minimálně. Loď sama by měla disponovat komplexním rozhodovacím systémem, který sám určí, zda jsou naměřené údaje v tolerovatelných rozestupech pro různé fáze přiblížení. K samotnému dokování by mělo dojít při vzájemné rychlosti 20 cm/s, přičemž boční odchylka je 18 centimetrů.
Tolik tedy neplánovaně zařazený popis čínské lodi Tiančou a v příštím díle Pohledu pod kůži se už opravdu podíváme na vědecké přístroje sondy Juno.
Zdroje informací:
http://spaceflight101.com/
Zdroje obrázků:
http://spaceflight101.com/spacecraft/wp-content/uploads/sites/18/2017/04/TZ-1-12.jpg
http://spaceflight101.com/spacecraft/wp-content/uploads/sites/18/2017/04/cssconcept.jpg
http://spaceflight101.com/spacecraft/wp-content/uploads/sites/18/2017/04/TZ05.jpg
http://spaceflight101.com/spacecraft/wp-content/uploads/sites/18/2017/04/TZ02.jpg
http://spaceflight101.com/spacecraft/wp-content/uploads/sites/18/2017/04/tg2-tz1-complex.jpg
http://spaceflight101.com/spacecraft/wp-content/uploads/sites/18/2017/04/TZ04.jpg
http://spaceflight101.com/spacecraft/wp-content/uploads/sites/18/2017/04/TG-2-02.jpg
http://spaceflight101.com/spacecraft/wp-content/uploads/sites/18/2017/04/TZ07.jpg
http://spaceflight101.com/spacecraft/wp-content/uploads/sites/18/2017/04/TG-2-03.jpg
http://spaceflight101.com/spacecraft/wp-content/uploads/sites/18/2017/04/up043700.jpg
http://spaceflight101.com/spacecraft/wp-content/uploads/sites/18/2017/04/TZ06.jpg
http://spaceflight101.com/spacecraft/wp-content/uploads/sites/18/2017/04/TG-2-06.jpg




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Těch 1553 standardů se ztratilo v překladu – asi to bude standardizovaná sběrnice MIL STD 1553, viz https://en.m.wikipedia.org/wiki/MIL-STD-1553
Aha, díky.
Dugi, ďakujem za promptné zaradenie zásobovacej lode TZ do seriálu „Pod kožu“. Bol to výborný diel (ako obvykle).
Inak, momentálne je štartovacie okno od 11:31 do 11:50 hod. UT 20.4.2017.
Rádo se stalo a díky za informaci o termínu. Je to docela blízko startu Sojuzu. 🙂
Ak všetko vyjde ako má tak to zajtra vyzerá na dvojboj…
Přesně tak. 🙂
Tady ta věta „K samotnému dokování by mělo dojít při vzájemné rychlosti 20 cm/s, přičemž boční odchylka je 18 centimetrů.“ nějak nedává smysl. Jak je to myšleno?
Podle zdroje jsem to pochopil tak, že spojení obou těles bude při relativní rychlosti 20 cm/s, přičemž spojení bude úspěšné, i když budou osy těles (dokovacích prvků) vůči sobě posunuty o 18 cm.
To přece nejde, aby se úspěšně spojily, když dokovací mechanismy nebudou v ose. To spíš vypadá na maximální odchylku od podélné osy v nějakém (rozhodujícím) okamžiku přibližování. Stejně tak 20 cm/s je skoro řádově vyšší rychlost při styku než je obvyklé.
Vycházel jsem z tohohle zdroje. Cituji: „Docking occurs at a relative speed of 0.2 meters per second and the lateral error has to be under 18 centimeters to accomplish a safe soft-docking.“ Rád to upravím tak, aby to bylo správně, jen nevím, jak přesně.
Třeba Číňani hrajou Kerbal Space Program. Tam jsou tyhle odchylky v normě 🙂
Prostě: „Boční odchylka při prvním vzájemném mechanickém kontaktu dokovacích částí APAS může být až 18 cm.“ A o to srovnání se snad postarají právě ty skloněné pasívní trčící „ploutve“ dokovacího systému na obou lodích. Ty totiž byly tím, co se vzájemně dotklo jako první a ty po sobě sklouznou a tak srovnají osy obou lodí.
No, někdy jsou v odborných článcích zaměněny anglosaské a evropské míry.. Holt ty šílené normy, že. Možná že to je i tento případ, co se týče rychlosti přibližování. Je fakt, že 20 cm/s by při 13 tunách byla pořádná pecka.
Podle dokumentace standardu IDSS (http://www.internationaldockingstandard.com/download/IDSS_IDD_Revision_E_TAGGED.pdf) je povolená přibližovací rychlost 5-10 cm/s, radiální do 4 cm/s s dostupnou odchylkou 10cm při dokování. Těch 20 cm/s je nějak moc.
Nezjišťoval jsem ovšem, jestli si Čína hraje na nějaké mezinárodní standardy…
Tak když do toho dokumentu mrknete na stranu 3-16 na řez ploutve s rozměry, kde jsou dva kritické průměry 1200 a 800 milimetrů, tak je z nich jasné, že tu boční odchylku 18 centimetrů to může zvládnout. Rychlosti neposuzuju.
Jen malá jazyková poznámka. Asi nikdo z nás není expert na čínštinu, nicméně Tianzhou má český přepis, který se přibližuje výslovnosti, Tchien-čou (Nebeská loď).
Díky za info. Vycházel jsem z podobnosti s názvem stanice Tiangong
Ano. Tiangong je Tchien-kung (Nebeský palác). Ale to je jen takový detail. Hlavně, že se dnešní start vydaří.
Baterie 40 ampérhodin ?? V běžném atomobilu bývá kapacita 50 a více. (Samozřejmě v olověném provedení.)
Otázka je, při jakém napětí. 12V to asi nebude
Pokud je výstup z těch baterií ta hodnota, se kterou pracuje elektronika na palubě, tedy 100 Voltů, tak ta baterie bude 8 krát větší než ta v tom vašem autě.