Rocket Lab
Společnost Rocket Lab získala další kontrakt od japonské firmy iQPS, která se zabývá radarovým snímkováním Země, na uskutečnění několika startů své rakety Electron.
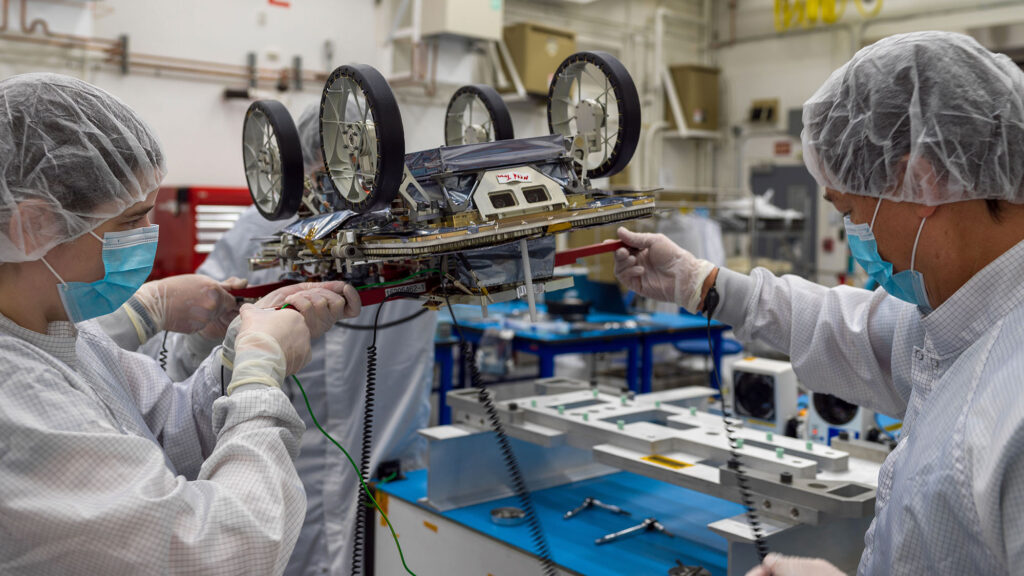
Tři lunární rovery o velikosti příručního zavazadla byly (stejně jako jejich základnová stanice) zabaleny a odeslány, aby mohly být spojeny s landerem, který je dopraví na povrch Měsíce. Malá americká vozítka, která mají vyzkoušet průzkum lunárního povrchu jako jeden tým, byla po zabalení odeslána z kalifornské Jet Propulsion Laboratory, což je jasná známka toho, že první část jejich cesty k Měsíci byla dokončena.

Trojice malých vozítek má prozkoumávat Měsíc a přitom vzájemně spolupracovat. Jejich start se nyní zase o kousek přiblížil. Inženýři z kalifornské Jet Propulsion Laboratory nedávno dokončili sestavování těchto samohybných robotů a poté je vystavili drsným zkouškám, které měly prokázat, že rovery přečkají nelehký start na raketě do kosmického prostoru, přelet k Měsíci i práci na jeho povrchu. V rámci technologické demonstrační mise CADRE (Cooperative Autonomous Distributed Robotic Exploration) budou na Měsíc vyslána vozítka o velikosti příručního kufříku, které budou čerpat energii z fotovoltaických článků. Rovery i další hardware budou připojeny na lander, který zamíří do oblasti Reiner Gamma. Po dobu přibližně 14 pozemských dní (jednoho lunárního dne) budou provádět experimenty zaměřené na autonomní průzkum, mapování a využití povrch penetrujícího radaru, díky kterému vědci nahlédnou pod povrch Měsíce.
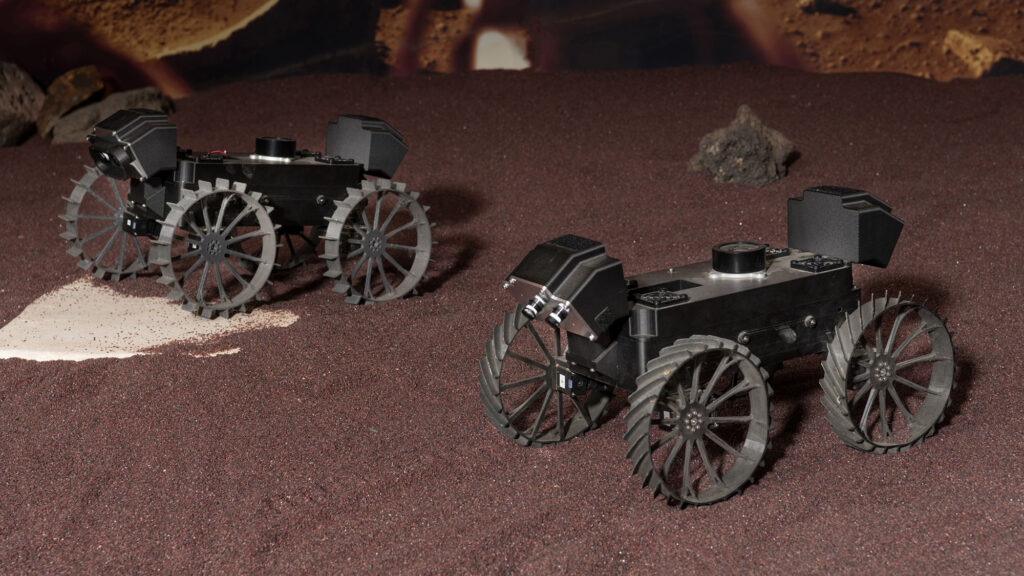
Vzpomínáte si ještě na téměř dva roky starý článek o testech vozítek CADRE (Cooperative Autonomous Distributed Robotic Exploration) na simulovaném lunárním regolitu? Článek končil tím, že by se jejich nástupci mohli do pěti let vydat na Měsíc v rámci programu CLPS. Téměř dva roky uplynuly a NASA nyní o projektu píše s jistotou jeho cesty na Měsíc. Tato tři malá vozítka (NASA jejich rozměry přirovnává k příručním zavazadlům) jsou výjimečná v tom, že budou spolupracovat bez přímého lidského zásahu. Mezi jejich úkoly bude patřit trojrozměrné mapování lunárního povrchu s využitím kamer a radaru, který penetruje povrch.
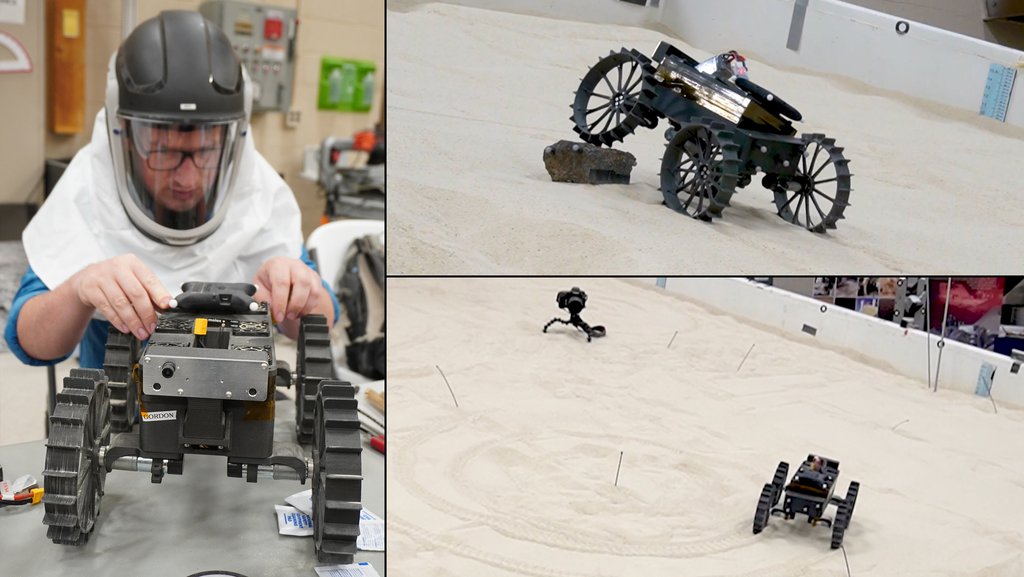
Laboratoř SLOPE (Simulated Lunar Operations) na Glennově středisku nedávno využil tým, který vyvíjí malá vozítka. V místnosti, která simuluje povrch Měsíce se malé rovery snažily jezdit po regolitu, aby inženýři lépe porozuměli výzvám, které na vozítka těchto velikostí čekají na povrchu Měsíce. Získané poznatky budou využity pro charakteristiku chování vozítek a zlepšení návrhu jejich mobility. Projekt CADRE (Cooperative Autonomous Distributed Robotic Exploration) vyvíjí roboty, kteří jsou naprogramováni, aby pracovali jako autonomní tým studující povrch Měsíce, sbírající data a 3D mapující různá místa Měsíce. Každé vozítko se může pohybovat nezávisle na ostatních a společně tak mohou provádět distribuovaná měření, která by byla pro jeden velký rover prakticky nemožná. Základ autonomní technologie pro projekt CADRE by se dal případně využít i na jiných kosmických tělesech jako je třeba Mars.
