V červnu 1965 byl uzavřen kontrakt mezi USAF a společností Martin Marietta, která měla postavit vztlakové těleso schopné suborbitálního letu. Jednalo se vlastně o následníka úspěšného programu ASSET, který měl rozšířit znalosti v oblasti hypersonického návratu do atmosféry. ASSET se věnoval především materiálové části a aeroelasticitě. Nový program se ale měl věnovat řízenému návratu a manévrovatelnosti. Původně byl stroj ve studiích označen jako SV-5 a později přeznačen na X-23 v rámci projektu PRIME (Precision Recovery Including Maneuvering Entry). Společně s projektem ASSET a PILOT patřily tyto projekty do programu letectva označeném jako START. Projekt PRIME prošel během studií mnoha měřeními v aerodynamických tunelech, aby bylo možné stanovit nejvhodnější tvar pro návrat. Právě duchovním otcem podoby SV-5 byl německý inženýr Hans Multhopp, který pracoval u společnosti Martin Marietta. Z dostupných materiálů lze říct, že Multhopp patřil k velmi respektovaným inženýrům v rámci společnosti.
X-23 PRIME 2/3
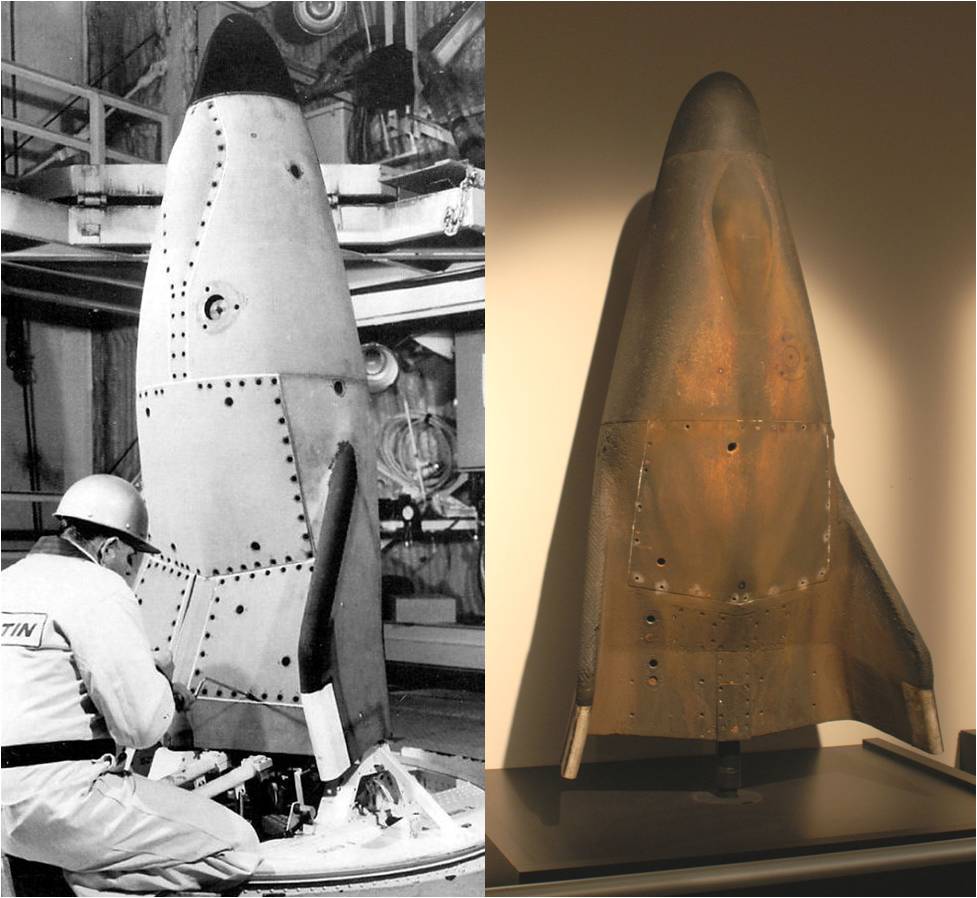
Zdroj: Martin X-24A Lifting Body
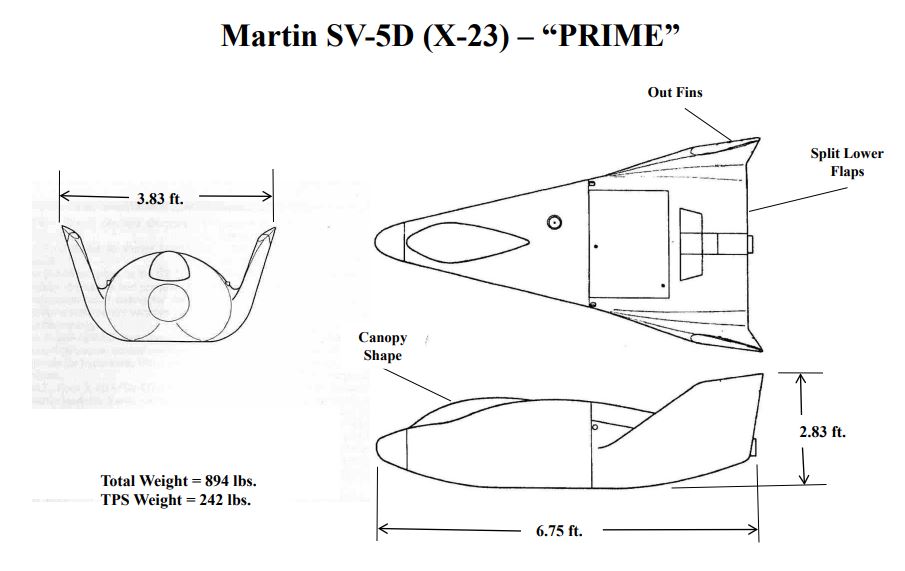
V dnešním díle o X-23 se budeme věnovat především technické části samotného stroje. SV-5 byl aerodynamicky ovládaný kluzák, schopný provést suborbitální let s řízeným návratem do atmosféry. Pro tento účel využívá přední část stroje tzv. tupého tvaru špičky/nosu. Tento tvar vycházel ze studie inženýra H. J. Allena pracujícím ve středisku v AMES. V případě „tupého“ tvaru přední části se před tělesem tvoří rázová vlna, která rozptyluje teplo. Tvar dále přechází do obloukové nástavby zajišťující podélnou stabilitu při nadzvukové rychlosti. Spodní část stroje je plochá pro maximalizaci aerodynamického ohřevu. Horní část trupu je tvarována pro let při podzvukové rychlosti. V minulém díle jsme se dozvěděli, že při rychlosti okolo M=0,8 docházelo ke zrychlení proudění na horní části trupu až na M=1 a tím docházelo ke vzniku lokální rázové vlny, která pak způsobila odtržení proudnic v oblasti řídících klapek a kormidel. Náběžné hrany SV-5 přechází ve vertikální stabilizátory. V zadní části jsou umístěny řídící kormidla ve spodní části trupu, zajišťující řiditelnost stroje. Samotné řízení SV-5 zajišťovala vždy kombinace vyklopení či společného chodu spodních kormidel. Během suborbitálního letu byl k řízení letu opět použit systém RCS.
Zdroj: Hypersonic Reentry from space
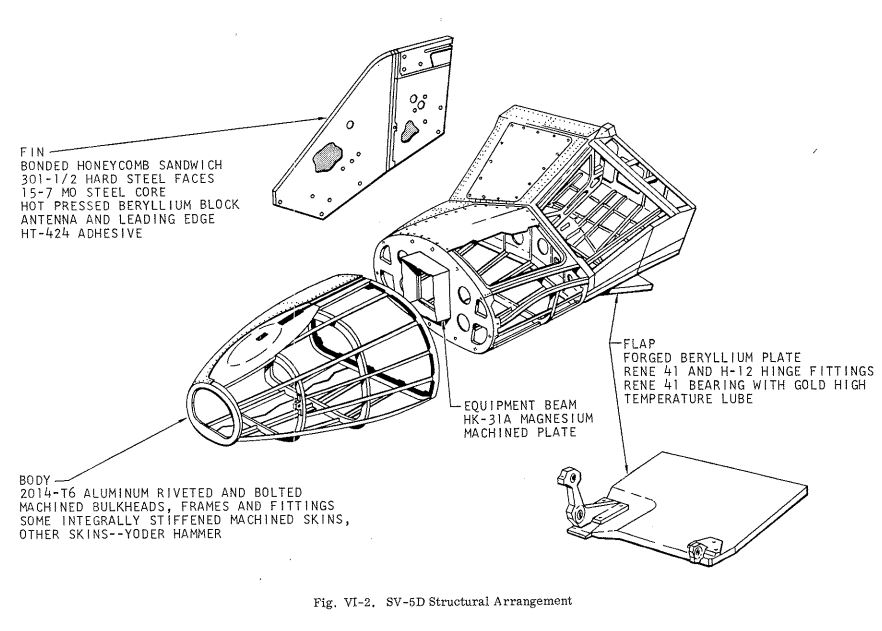
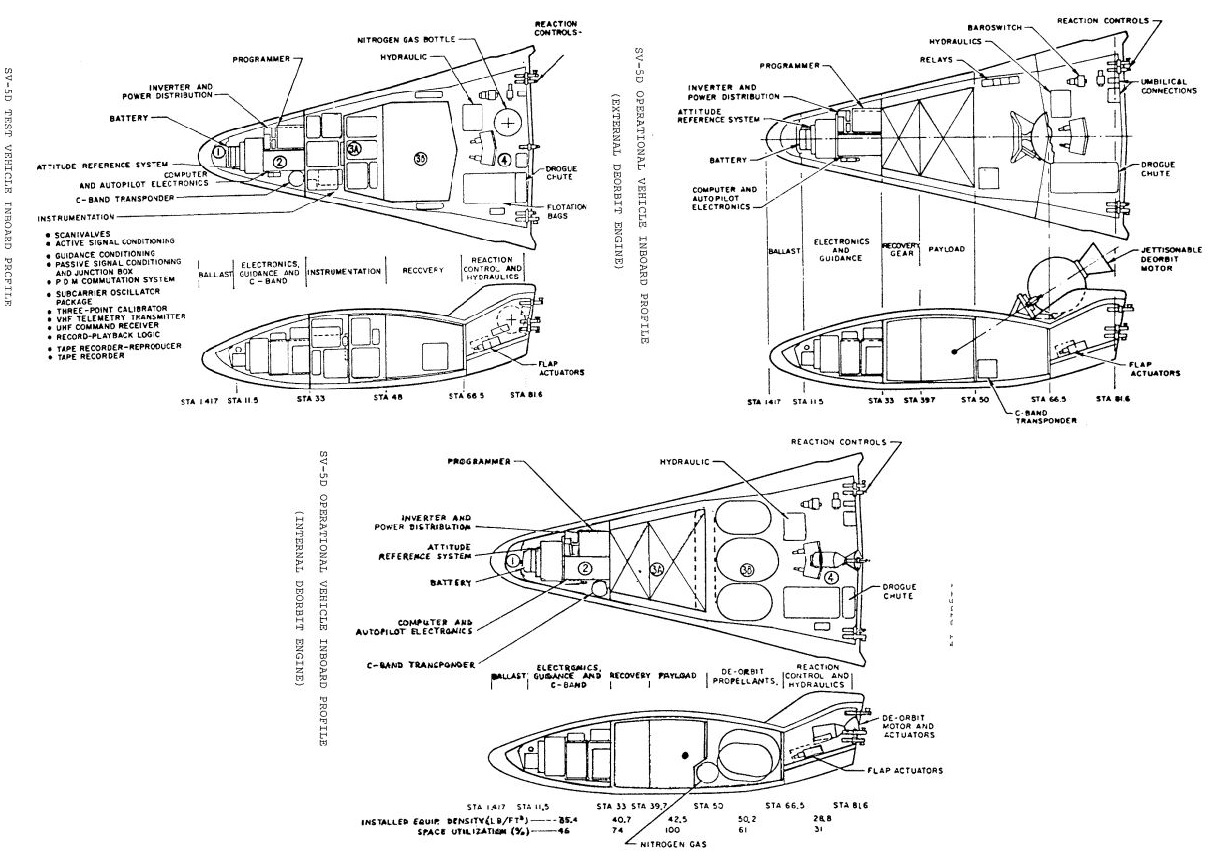
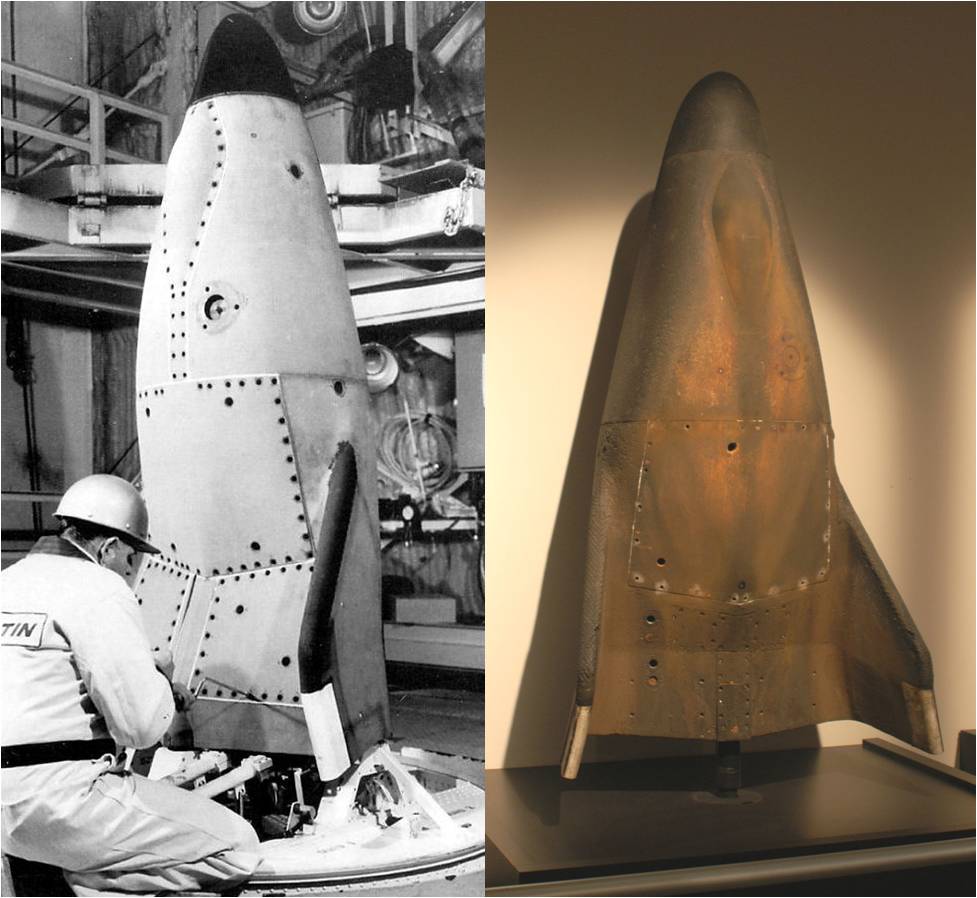
X-23 byl od začátku svého vzniku plánován jako stroj, který využije ablativního tepelného štítu. Na základní konstrukci draku byly využity klasické materiály běžně používané v letectví v kombinaci s materiály odolávající vysokým teplotám. Drak stroje byl tedy vyroben ze slitin hliníku s využitím titanových prvků konstrukce. Samotná konstrukce byla rozdělena na dvě části v oblasti draku, dále pak na dva vertikální stabilizátory a na spodní části byly montovány řídící klapky. Přední část byla využita jako přístrojový úsek, ve kterém se ve špici stroje nacházelo vyvážení celého stroje. Zadní část draku byla pak vybavena záchranným systémem, systémem RCS, de-orbitačním systémem a palivovým úsekem. Vertikální stabilizátory byly vyrobeny z voštiny. Celá konstrukce byla pak pokryta ablativním tepelným štítem složeným ze silikon-nylonového vlákna aplikovaného na silikonovou voštinovou základnu. Tloušťka se pohybovala od 2 do 7 cm v závislosti na očekávané rychlosti ohřevu. Špička stroje byla chráněna uhlíkovo-fenolovou pryskyřicí.
Popsali jsme si zevrubným stylem konstrukci X-23 a nyní bychom se věnovali podrobněji nejen systémům, ale i celému profilu letu. Původní plán, který počítal se starty X-23 z mysu Cape Canaveral, byl brzy změněn na západní testovací okruh, nebo-li WTR (West Test Range). Tato oblast dovolovala simulovat návratové podmínky z plánované výšky okolo 121 km. Starty měly probíhat ze startovní rampy SLC-3 na Vandenbergově základně v Kalifornii a návrat měl probíhat v oblasti atolu Kwajalein Test Site (KTS) na Marshallových ostrovech. Výhodou této oblasti byla i přítomnost vojenského letiště na ostrově Roi Namur. Samotný X-23 měl být vynášen vstříc nebi nosnou raketou SLV-3 Atlas, která byla pro tento účel modifikována, aby mohla na svém vrcholu nést pod aerodynamickým krytem právě X-23.
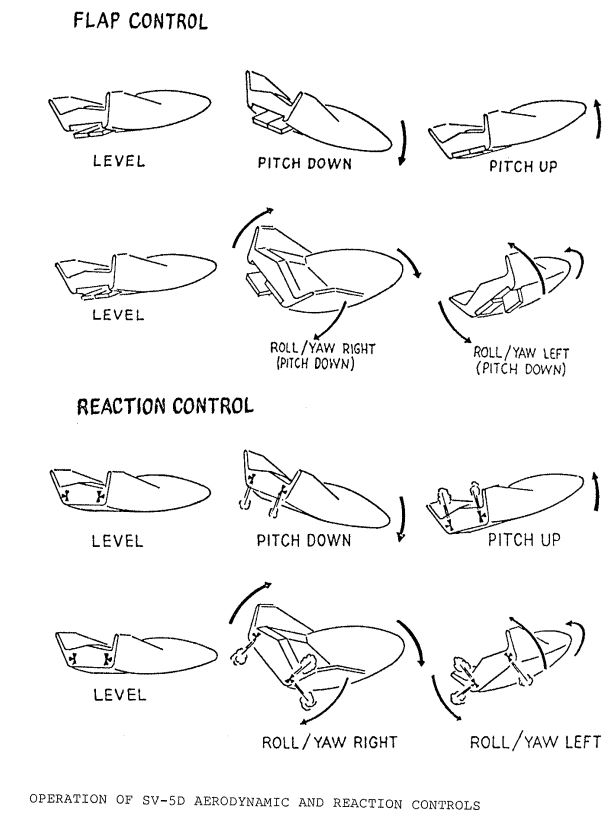
Zdroj: SV-5D PRIME report ER 14465
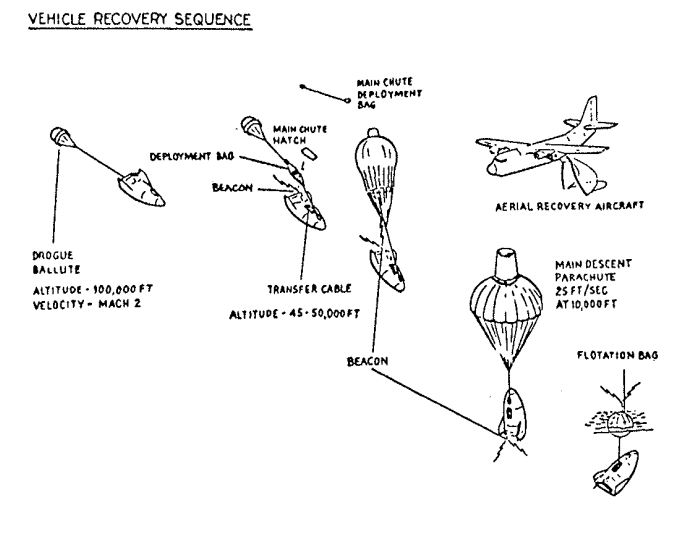
Suborbitální let probíhal tedy startem z Vandenbergovi základny na vrcholu rakety SLV-3 Atlas. Po vynesení do požadované výšky, cca 121 km došlo k oddělení od rakety a samotný kluzák pokračoval v exoatmosférickém letu. Během této doby byla poloha udržována systémem RCS trysek a navigační aparatura vedla celý stroj do oblasti návratu se zakončeným přistáním u Marshallových ostrovů. Po opětovném vstupu do hustějších vrstev atmosféry prošel kluzák největším tepelným namáháním konstrukce pokryté ablativním tepelným štítem. Po průchodu přepíná systém řízení z reaktivních trysek na systém aerodynamického ovládaní, které využívá dvě navzájem nezávislé klapky na spodní části trupu. Na přiloženém obrázku může pozorný čtenář vidět princip funkce těchto klapek. Během ztráty spojení při sestupu dochází k nahrávání telemetrických dat na magnetickou pásku, která je montována uvnitř stroje, aby po obnově spojení byla zaznamenaná data vysílána k pozemní stanici. Stejný systém využíval už předchůdce X-23, a to projekt ASSET. Po obnově spojení se X-23 nacházel přibližně okolo 600 km od oblasti přistání. Během této doby došlo k zachycení stroje radarem, v pásmu C, sledující jeho návrat z ostrova Roi Namur. Závěrečné navádění poskytoval komplex radaru TRADEX, počítače IBM 7090 a vysílače AN/FRW-2. Během letu při rychlostech okolo M=2-3 docházelo k vypuštění padáku, který zařídil snížení rychlosti letu a stabilizaci celého kluzáku při přechodu do podzvukových rychlostí. Ve výšce okolo 15 km došlo k vypuštění hlavního padáku a zpomalení na rychlost 7 m/s. V této fázi se ale už X-23 rozchází od svého předchůdce ASSETu. V této fázi docházelo totiž k zachycení celého kluzáku záchranným letounem JC-130 B, tzn. kluzák neměl primárně přistát na hladině moře, ale měl být zachycen ještě za letu. Stejný způsob se například využíval při návratech kontejnerů ze satelitního průzkumného systému CORONA. Pokud by se zachycení z nějakého důvodu nepodařilo, bylo jako záložní řešení možné „šplouchnout“ do moře, kde byl pak kluzák vytažen záchranným týmem. Pro tento případ byl na palubě instalován záchranný vak či bóje, která udržela X-23 na hladině.
Zdroj: Project PRIME: Hypersonic Reentry from space
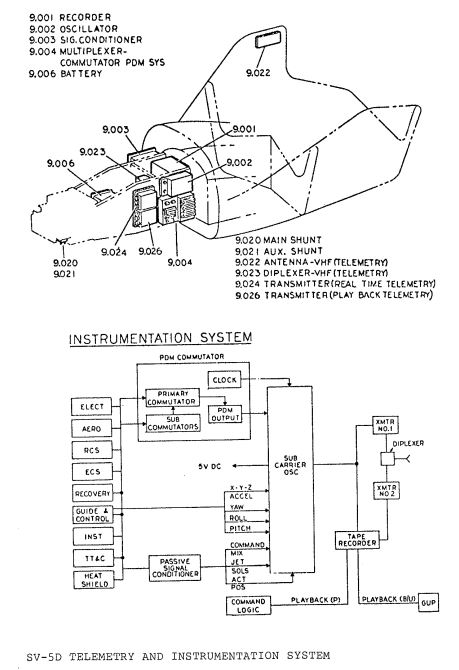
Nyní se podíváme na palubní vybavení celého kluzáku. Systém řízení a navigace byl složen z několika subsystémů založených na systému ARTIS (Attitude Reference and Trajectory Instrumentation System), který obsahoval gyroskopickou inerciální soustavu v kombinaci s akcelerometry, systém měničů napájecí soustavy, programátor s naprogramovanými povely pro řízení a nakonec autopilota. Celý systém řízení vydával povely pro oba systémy řízení, tedy pro RCS a aerodynamické řízení. Samotný systém aerodynamického řízení využíval pro svůj pohon hydraulické soustavy. Celý tento systém byl sám o sobě zdrojem vnitřního tepla. Vzhledem k tomu, že kluzák měl procházet při návratu atmosférou, ve které dochází ke značnému ohřevu, bylo nutné vybavit systémy chlazením. Chlazení využívalo pasivní systém odpařování s využitím vody jako chladícího média.
Záchranný systém sestával z brzdícího padáku, hlavního padáku, lokalizace a bóje, která udržela kluzák na hladině, pokud bylo nutné přistát na vodě. Celý systém byl řízen pomocí barometrických spínačů. Vypuštění hlavního padáku bylo navíc zálohováno i pozemním příkazem pro uvolnění. Nutno dodat, že narozdíl od projektu ASSET nebyl kluzák X-23 vybaven autodestrukčním systémem.
Systém telemetrie využíval pásmo C s anténami montovanými do odtokové části vertikálních stabilizátorů s vysíláním ve VHF. V případě využití pásma VHF však došlo ke změně, protože se ukázalo, že vysílaný signál je výrazně slabší, než se očekávalo. Řešením se stala výměna za pásmo UHF.
Zdroj: Project PRIME: Hypersonic Reentry from space
V zadní části konstrukce se nacházel systém reaktivního řízení RCS i s tlakovými lahvemi pro tento systém. Návratový motor s pohonnými látkami a hydraulický úsek. Rozložení systémů v konstrukci krásně vykresluje přiložený obrázek.
Jedním z bodů, kterému byla věnována pozornost byl padákový systém. Tento systém měl již určité problémy během programu ASSET. Za účelem testování proběhlo několik shozů, u kterých se ukázalo, že je problém s brzdícím/výtažným padáčkem, který několikrát selhal. Řešením se nakonec stala nová konstrukce padáku. V listopadu 1965 bylo dokončena zpráva hodnotící konstrukční uspořádání a řešení, která zhodnotila, že všechny systémy jsou v pořádku a připraveny k výrobě, výkresová dokumentace byla také v pořádku a nic již nebránilo začít s kompletní výrobou prvních kusů. Jedinou „kaňkou“ ve zprávě se ale stal právě záchranný systém, který nabral během vývoje zpoždění a ještě nebyl připraven. Důvodem byl právě onen padák. Jedním z problémů během testování se ukázal i nový autopilot, který během kvalifikačních testů opakovaně selhával. Řešení problémů nakonec zabralo poměrně více času, než se očekávalo a nakonec byla platforma montována až na dokončeném stroji. Jedním z faktorů řešení bylo využití nové kabeláže a konektorů. Samotná výroba prvního kusu ale přinášela mnoho a mnoho problémů, jak to ostatně u prototypů bývá. Například společnost Honeywell pracovala 24/7, aby stihla dodat kompletní navigační systém. Chronickým problém se opět ukázaly padáky, tentokrát se ale jednalo přímo o hlavní padák, který během testů neustále selhával a trvalo poměrně dlouhou dobu, než se podařilo systém „vyladit“. X-23 měl během vývoje problémy s váhou, která byla značně překročená a docházelo tak neustále k zeštíhlování. Právě váha v kombinaci se slabšími padákovými šňůrami se ukázala jako problém. Řešením bylo kromě zeštíhlení i výměna padákových šňůr za silnější typ.

Zdroj: https: thespacereview.comZdroj: https://www.thespacereview.com/
U padáků se ještě chvíli zdržíme. Vlivem neúspěšných shozů se rozhodl kapitán I. J. Gennaci, jako vedoucí sekce záchranného systému, navštívit továrnu Goodyear Aerospace ve Phoenixu společně s odborníkem z oblasti padákové výroby a vývoje Henry Epplem. Návštěva výrobního závodu je však velmi znepokojila, protože pracovní technologie byla značně „hrubá“ a postrádala jakoukoliv průběžnou kontrolu kvality. Dalším problémem bylo i to, že pracovníci společnosti neměli žádné zkušenosti z oblasti padákové výroby! Na základě těchto zjištění došlo okamžitě k velkým změnám ve výrobě padáků u společnosti.
Stejně jako v případě ASSETu se i u PRIME ujala provozu a zabezpečení startů divize SSD (Space System Division). X-23 procházel roku 1966 závěrečnými zkouškami a nyní už bylo jasné, že i stanovená váha pro start se podaří dodržet. Následující starty X-23 byly v letovém plánu označeny jako FV (Flight Vehicle) spolu s číselným označením letu. Program v průběhu vývoje nabral zpoždění, které bylo způsobeno již uvedenými problémy s padákovým systémem a navigační aparaturou od Honeywellu. Termín prvního letu tak sklouzl až na prosinec roku 1966.
Zdroj: Project PRIME: Hypersonic Reentry from space
Zdroje informací:
Project PRIME: Hypersonic Reentry from space, Autor Richard P. Hallion, rok vydání 1987
SV-5D PRIME report ER 14465, Autor společnost Martin Marietta, rok vydání 1967
Martin X-24A Lifting Body, Autor Miles Miller, rok vydání 2012, JHU Odyssey Program
http://www.astronautix.com/p/prime.html
https://www.thespacereview.com/
https://www.thespacereview.com/
Zdroje obrázků:
https://whiteeagleaerospace.
Martin X-24A Lifting Body, strana 41
Project PRIME: Hypersonic Reentry from space, strana 649
Project PRIME: Hypersonic Reentry from space, strana 651
Project PRIME: Hypersonic Reentry from space, strana 655
Project PRIME: Hypersonic Reentry from space, strana 643, 645, 647
SV-5D PRIME report ER 14465, strana VI-16
https://www.thespacereview.com







{kind=link}
{kind=link}