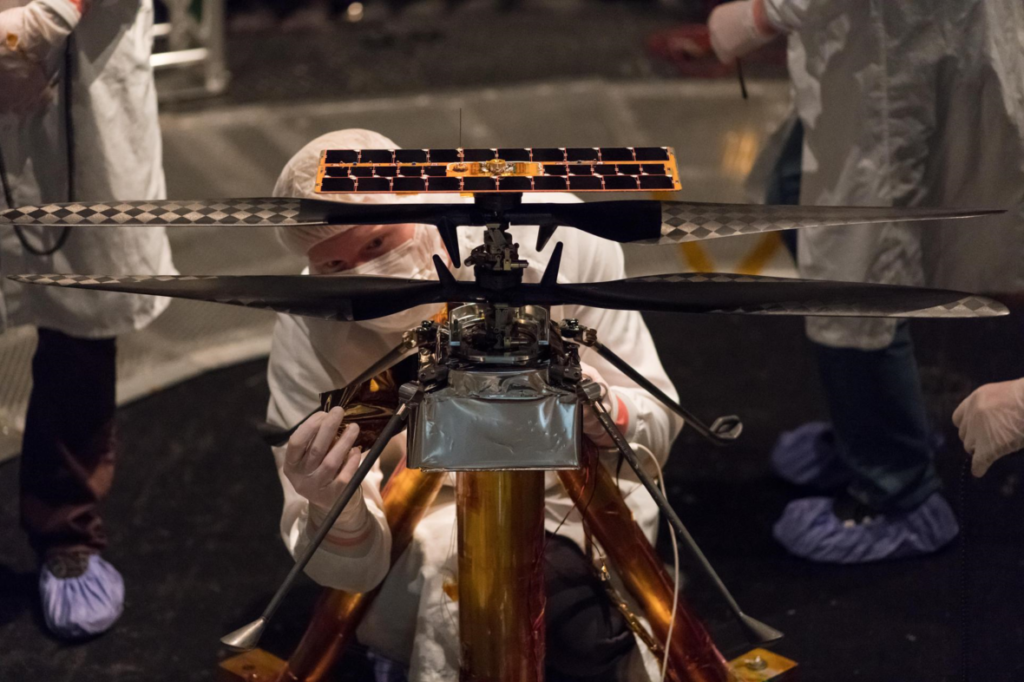
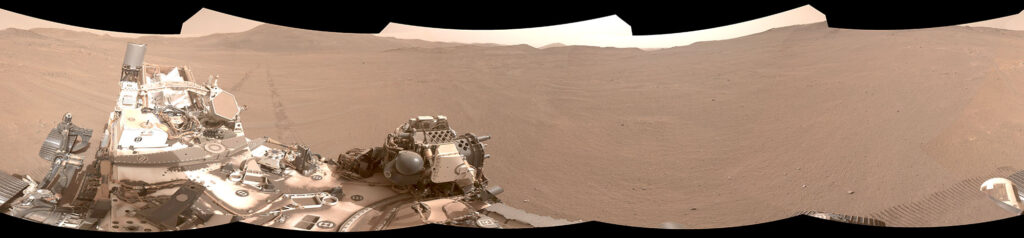
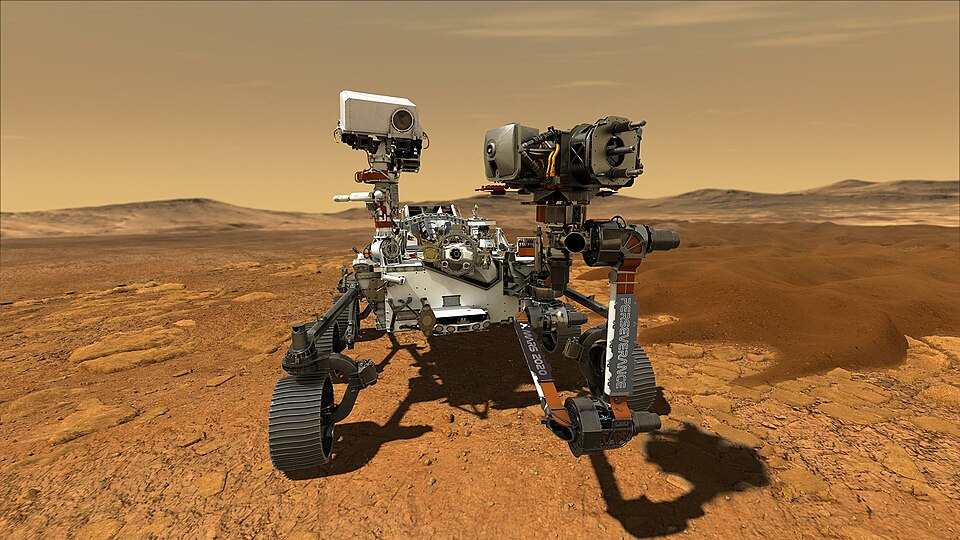
Pod břichem roveru Perseverence, který 18. února úspěšně přistál v kráteru Jezero, je zavěšena malá helikoptéra se jménem Ingenuity (vynalézavost, důvtip). Jak jsme vás informovali už v předchozích článcích, například tady, tento malý experimentální vrtulový dron se má stát prvním strojem, který se pokusí o řízený motorický let na Marsu. Základní technické údaje o něm najdete na konci tohoto článku.
Aby se Ingenuity povedlo tento cíl splnit, bude muset přežít mrazivé teploty Marsovských nocí, zvládnout nemilosrdně nízké příděly energie a přitom se pokusit o několik 90 sekund trvajících letů se Zemí vzdálenou více než 11 světelných minut. Znamená to, že komunikace s řídícím střediskem v reálném čase bude zcela vyloučená. Abychom pochopili jak v NASA připravili test této nové technologie, vyzpovídal redaktor Evan Ackerman pro IEEE Spectrum vedoucího letových operací pro Marsovské helikoptéry Tima Canhama z JPL (Jet Propulsion Laboratory).
Je důležité znovu připomenout, že údělem helikoptéry Ingenuity je technologicky demonstrační mise. Jejím primárním cílem je ověřit možnosti přízemního letu v podmínkách Marsu, nic víc. Ingenuity nebude provádět žádná vědecká pozorování ani měření, jako se to očekává od roveru Perseverance. Pokud půjde vše dobře, helikoptéra pořídí jen několik snímků za letu a to bude vše. Skutečná hodnota a důležitý výsledek testování Ingenuity bude úspěšně ověřit, že je řízený let v atmosféře Marsu možný a budou nasbírána cenná technická data. Ta pak pomohou při konstruování další generace létajících aparátů s rotující nosnou plochou, která umožní plnit mnohem ambicióznější mise.
S Ingenuity není v plánu provádět cokoli komplikovaného, protože vše spojené s tímto zařízením samotným je komplikované už dost samo o sobě. Létat s vrtulníkem na Marsu je silnou výzvou z několika důvodů, jako například velmi řídká atmosféra (hustota přibližně 1% pozemské), energetická náročnost a omezené možnosti komunikace.
Když si uvědomíme všechny tyto nepříznivé podmínky, bude vysazení Ingenuity na Mars v jednom kuse a její byť jen jediný vzlet a přistání pro NASA jistým vítězstvím. Tim Canham se podílel na tvorbě SW architektury, která Ingenuity ovládá. Jako vedoucí letových operací se teď soustředí hlavně na plánování letů a koordinaci činnosti s týmem roveru Perseverence. Následující rozhovor s Canhamem nám umožní lépe pochopit jak bude Ingenuity při svých letech na Marsu závislá na autonomním řízení.
IEEE Spectrum: Co nám můžete prozradit o hardware Ingenutity?
Tim Canham: Jelikož je Ingenuity klasifikována jako technologický demonstrátor, byla v JPL schválena možnost jít při její stavbě do většího rizika. Velké bezpilotní sondy a projekty, jako jsou planetární rovery a průzkumné sondy do hlubokého vesmíru jsou klasifikovány jako mise třídy B, na jejichž hardwaru a softwaru pracují stovky lidí mnoho let. U těch moc riskovat nechceme. S technologickými demonstrátory, kde chce JPL otestovat nové konstrukce a postupy řešení, je to ale jiné. To znamená, že v případě stavby Ingenuity jsme doslova i obrazně vyrazili ven z dílen JPL a nakoupili mnoho standardních, komerčně dostupných součástek.
Sice máme uvnitř v avionice některé radiačně odolné součástky, které toho vydrží opravdu hodně, ale většina použitých technologií je běžně dostupná na komerčním trhu komukoli. Například základní deska s procesorem, kterou jsme použili, je Snapdragon 801 od Qualcommu. Je osazena procesorem pro chytré mobilní telefony a je velmi malá. Ironií je, že tento relativně moderní kus výpočetní techniky je mnohokrát výkonnější než procesory použité na mateřském roveru. S naším HW v helikoptéře máme dokonce o několik řádů větší výpočetní výkon, než je v řídicím počítači Perseverence, protože to zkrátka potřebujeme. Cyklus našeho řídícího SW pracuje s frekvencí 500 Hz, abychom mohli bezpečně zajistit řízený let. Navíc za letu průběžně pořizujeme snímky, na kterých SW rozpoznává kontrastní útvary na povrchu (kameny, trhliny), jejichž pohyb sledujeme snímek po snímku s frekvencí 30 Hz, takže pro toto všechno potřebujeme skutečně solidní výpočetní výkon. Avionika, kterou NASA používá u současných planetárních sond, není ani zdaleka tak výkonná, jak bychom pro tento účel potřebovali. V několika případech jsme dokonce objednávali součástky z obchodu s elektronikou SparkFun. Naší filosofií bylo: Je to sice komerční hardware, ale my si ho pečlivě otestujeme a pokud bude fungovat dobře, tak jej použijeme.
Můžete popsat jaké senzory používá Ingenuity pro navigaci?
Použili jsme IMU (inerciální měřicí jednotku) pro mobilní telefony, laserový výškoměr (ze SparkFun) a dolů mířící VGA kameru pro sledování terénu. Mezi jednotlivými snímky z palubní kamery průběžně porovnáváme pozici několika desítek povrchových útvarů, čímž určujeme směr a rychlost pohybu, což helikoptéře dovoluje autonomní navigaci za letu. Vše je založeno na odhadu okamžité polohy, na rozdíl od jiných metod s ukládáním povrchových útvarů do paměti a vytvářením mapy blízkého okolí (jak to dělají například rovery, pozn.redakce).
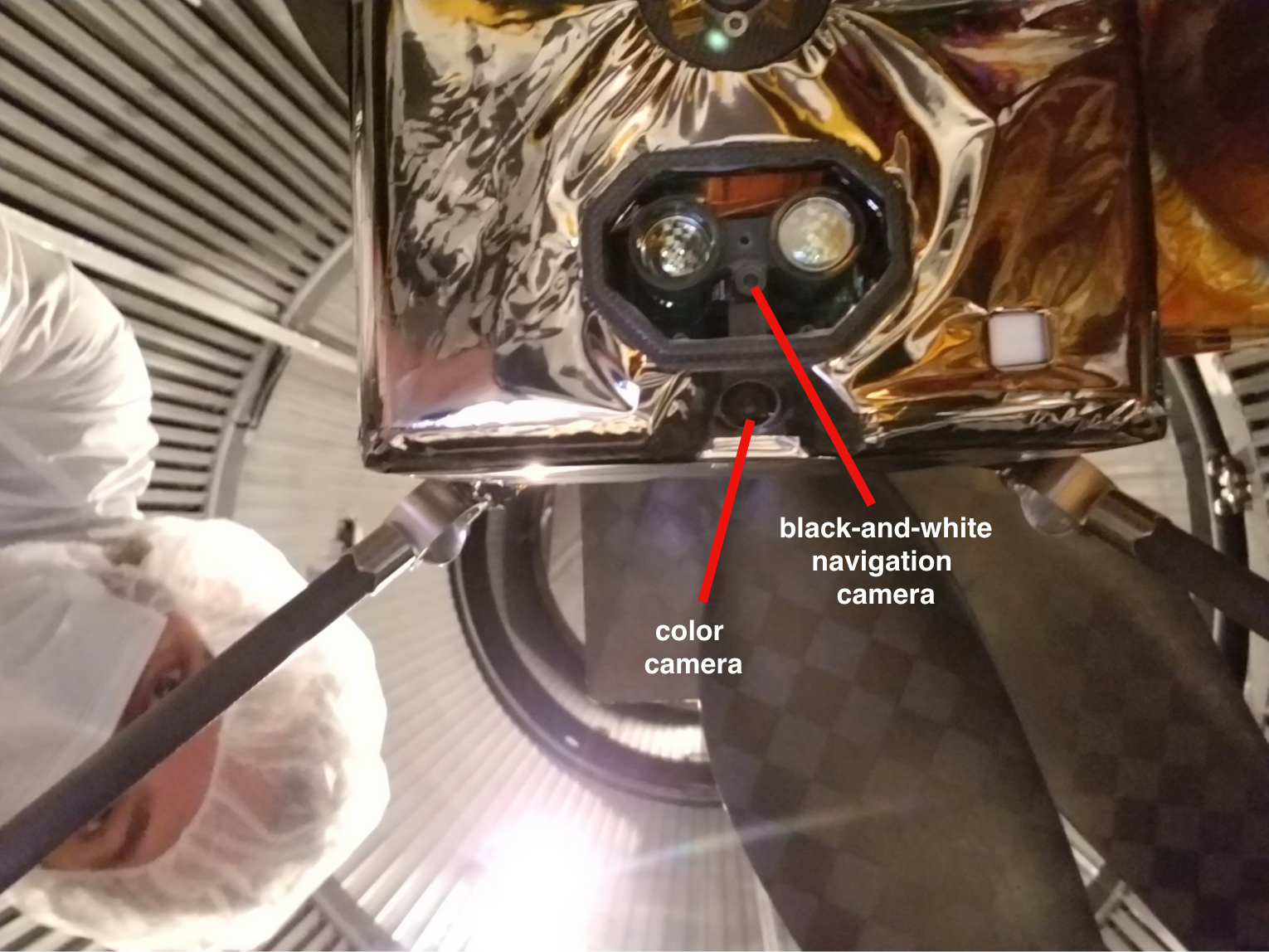
Na palubě je sklonoměr, který používáme ke stanovení náklonu během vzletu a také 13 Mpx barevná kamera z mobilních telefonů, která nebude používaná pro navigaci, ale pouze pro pořizování pěkných snímků za letu. Nazýváme ji RTE, protože u nás musí mít všechno svou zkratku. Na počátku vývoje jsme uvažovali, že bychom také přidali funkci detekce překážek, ale neměli jsme na tento vývoj dostatek času.
Do jaké míry je vrtulník schopen fungovat samostatně?
O helikoptéře můžete v některých aspektech uvažovat jako o tradiční kosmické sondě z dílen JPL. Obsahuje v sobě sekvenční program, pro který jsme napsali sadu několika sekvenci složených z jednotlivých příkazů, které jsme ve formě souborů nahráli do počítače helikoptéry. Ta pak tyto příkazy vykonává. Na Zemi naplánujeme navigační část letu, ověříme to v simulačním SW a určíme sérii kontrolních bodů po trase. Tyto kontrolní body pak transformujeme na sérii povelů, které pošleme do naváděcí části SW helikoptéry. Když chceme s Ingenuity provést let, řekneme jí leť podle této sekvence, naváděcí SW převezme řízení, vykoná vzlet a přelet po trase z předem zadaných kontrolních bodů až do přistání.
Z toho je zřejmé, že tyto lety budou celkem podrobně naplánované. Není to pravá autonomie v tom smyslu, že bychom zadávali pouze cíl a pravidla pohybu a v palubním počítači by probíhalo komplikované rozhodování jak let vykonat. Je to dejme tomu poloviční autonomie. Na druhou stranu, plné ovládání člověkem by znamenalo, že na Zemi sedí pilot a joystickem řídil celý let, což z důvodu vysokého zpoždění signálu mezi Zemí a Marsem samozřejmě není možné. V tomto projektu jsme bohužel neměli dostatek času na to, abychom naprogramovali skutečně hlubokou autonomii helikoptéry, takže jsme zvolili kompromisní řešení, kdy dopředu pošleme detailní letový plán a Ingenuity vykoná let po předem zadané trase. Během letu se jen autonomně stará o to, aby se pohybovala po vybrané trase a to i s vlivem větru nebo dalších okolností, které mohou v okolním prostředí nastat.
Tato mise rozhodně není ověřováním nějakého konceptu pokročilého autonomního řízení a navigace — něco ve smyslu, že bychom pouze zadali úkol “leť k tamtomu kamenu a vyfoť ho”, což by byl příklad pokročilé autonomie. Tak tomu rozhodně není. Toto je skutečně případ předprogramovaného letu, kdy naším hlavním cílem je ověřit, že takový let je v podmínkách Marsu možné úspěšně provést. Existují koncepty budoucích misí, na kterých momentálně pracujeme a ty zahrnují i helikoptéry větších rozměrů, s mnohem větším stupněm autonomie, které by měly být schopné plnit úkoly mnohem samostatněji.
Pokud si vzpomenete na Mars Pathfinder s úplně prvním kolovým roverem Sojourner, který jezdil po Marsu, tak ten měl velmi jednoduché zadání: jezdit v kruhu kolem základové stanice – landeru, cestou pořídit pár obrázků a jedním přístrojem provést velmi základní rozbor několika málo kamenů. Jako technologický demonstrátor se i my s helikoptérou budeme tentokrát snažit o něco podobného – v reálných podmínkách otestovat jen ty nejzákladnější funkce a činnosti, jelikož to bude premiéra.
Existuje nějaká situace, která by mohla helikoptéru přimět k rozhodnutí letět mimo určenou trasu?
Řídící software nepřetržitě kontroluje, zda jsou všechny senzory na helikoptéře v pořádku a poskytují smysluplná data. Pokud se některý ze senzorů „zblázní“ a data z něj silně vybočují od předchozích hodnot, helikoptéra na to zareaguje vždy stejným způsobem: použije poslední správné hodnoty ze všech senzorů, okamžitě se pokusí přistát, odvysílá informaci o poruše a čeká na další povely. Ingenuity se nebude pokoušet pokračovat v letu, pokud některý ze senzorů selže. Všechny tři senzory, které používáme za letu, jsou zcela nezbytné pro řízený let, protože jejich data jsou používána společně v řídicím algoritmu.
Jak se budete rozhodovat, kam Ingenuity poletí?
Provádíme něco, čemu říkáme proces výběru startovacího místa. Tento proces probíhá už nějakou dobu na základě satelitních snímků přistávací oblasti. Byl to takový hrubý dálkový průzkum, identifikující řadu potenciálně vhodných míst pro vysazení vrtulníku. Po přistání roveru Perseverence se nám počet těchto míst celkem zúžil, jelikož jsme mohli vyřadit ta místa, která jsou od lokality přistání roveru hodně daleko. Po přistání a oživení systémů rover provede velmi důkladná pozorování okolního terénu a na základě charakteristik jako sklon terénu, hustota pokrytí kameny, jejich velikosti a také jak je povrch texturovaný pro autonomní navigaci, se nakonec rozhodneme pro místo vysazení a oblast provozu helikoptéry. Existují kompromisy, které budeme muset udělat, protože nejbezpečnější povrch je takový který je hladký, bez kamenů, ale zároveň je nejméně vhodný pro sledování vlastního letu, protože na navigačních snímcích by chyběly orientační body. Takže musíme najít správnou rovnováhu mezi oběma požadavky a vybrat lokalitu s malými kamínky, které pomůžou s orientací, ale žádné větší kameny nebo trhliny, které by představovali zvýšené riziko pro přistání.
Jaké typy letových úloh bude robot schopen provádět?
Jelikož toto zkoušíme úplně poprvé, máme zatím naplánovány jen 3 první lety. Při těch helikoptéra pokaždé přistane na stejném místě jako odstartovala, jelikož víme, že toto místo bude pro přistání bezpečné. Na všechny testy s Ingenuity máme k dispozici časové okno 30 dnů, takže pokud nám zbude dostatek času, můžeme se pokusit o přistání i na vzdálenějším místě, které bude z dálky vypadat pro přistání bezpečně. Ovšem ty tři základní lety budou všechny vesměs podobně, vždy to bude vzlet, let po vytyčené trase, návrat k místu vzletu a přistání na stejném místě.
JPL má ve své historii řady robotů, které dokázaly zůstat v provozu mnohem déle, než byla délka jejich primární mise. Jelikož vaše mise potrvá pouhých 30 dní, znamená to, že pokud nedojde k nějaké nehodě, odjede rover po měsíci od dokonale funkční marsovské helikoptéry?
Ano, tak je to v plánu, protože pak rover musí pokračovat ve své primární misi. (rover bude zaparkován celých 30 dní cca 100 m od Ingenuity, aby pořizoval fotodokumentaci testu a zajišťoval obousměrné spojení mezi ní a řídícím střediskem na Zemi. pozn. redakce) Naše aktivity s Ingenuity budou také vyžadovat podporu širšího týmu, která alokuje určité zdroje, takže jsme dostali k dispozici jen toto 30-ti denní okno, za které jsme samozřejmě velmi rádi. Pak se rover rozjede dál, ať už budeme s helikoptérou chtít pokračovat v práci, nebo ne. Pokud budeme chtít vyzkoušet cokoliv bláznivého, musíme to stihnout během 30 dní. Poslední 2 lety ještě nemáme naplánovány. Vše záleží na tom, jak rychle se nám podaří splnit testovací program prvních 3 letů. Pak bychom si mohli troufnout na něco více exotického a trochu zariskovat. Ale pro začátek se budeme plně soustředit na ony první tři lety.
Naše hlavní kritérium úspěchu je vykonat alespoň jeden let, takže pokud se nám první let podaří, budeme si šťastní gratulovat. Další dva lety budou o něco víc rozšiřovat naši letovou obálku. A pak ty poslední dva lety… kdo ví, jaké dobrodružství nám situace dovolí. Možná můžeme odletět někam stovky metrů daleko, vyzkoušet si let po kruhové dráze, nebo něco podobného. Celé testování bude o tom pochopit a ověřit si, jak se toto zařízení chová za letu, což se nedozvíme jinak, než že s ním poprvé vzlétneme a uvidíme.
Řekněme, že první 4 lety dopadnou perfektně a zbude vám čas jen na poslední pátý let. Budete chtít vyzkoušet něco skutečně dobrodružného, co by nemuselo dopadnout úplně dobře, nebo raději zvolíte něco bezpečného, co sice proběhne zcela v pořádku, ale zase se moc nového nedozvíte?
To je dobrá otázka, ještě o tom budeme muset pouvažovat. Pokud nám bude zbývat poslední let a rover helikoptéru tak jako tak brzo opustí, možná bychom mohli vyzkoušet něco odvážného. Ale zatím jsme se tak daleko nedostali. Skutečně se soustředíme jen na ty první tři lety a vše navíc bude pro naši misi bonusem.
Je něco dalšího, co byste mohl prozradit o helikoptéře a bylo by obzvlášť zajímavé pro techniky a inženýry?
Bude to poprvé, kdy poletíme na Marsu s Linuxem. Celý provoz helikoptéry Ingenuity běží na operačním systému Linux. Softwarový aplikační rámec, který tady používáme, je stejný jako jsme vyvinuli v JPL pro cubesaty a různé další přístroje a který jsme dali před pár lety volně k dispozici veřejnosti. Takže pokud chcete, můžete si zdarma stáhnout softwarový rámec, který létá v helikoptéře na Marsu a použít ho pro svůj vlastní projekt. Je to svého druhu vítězství open-source strategie, protože my létáme s open-source operačním systémem, s open-source letovým sofwarovým rámcem a také na komerčně dostupných součástkách, které si můžete zakoupit přímo v obchodě, pokud byste si jednou chtěli postavit podobné zařízení. Toto je pro JPL něco zcela nového, protože zde je zvykem používat jen velmi bezpečné a prověřené postupy a součástky, takže z naší mise je mnoho lidí velmi nadšeno a všichni se těšíme, jak se nám bude při nadcházejících testech dařit.
Předpokládané schéma letové zóny
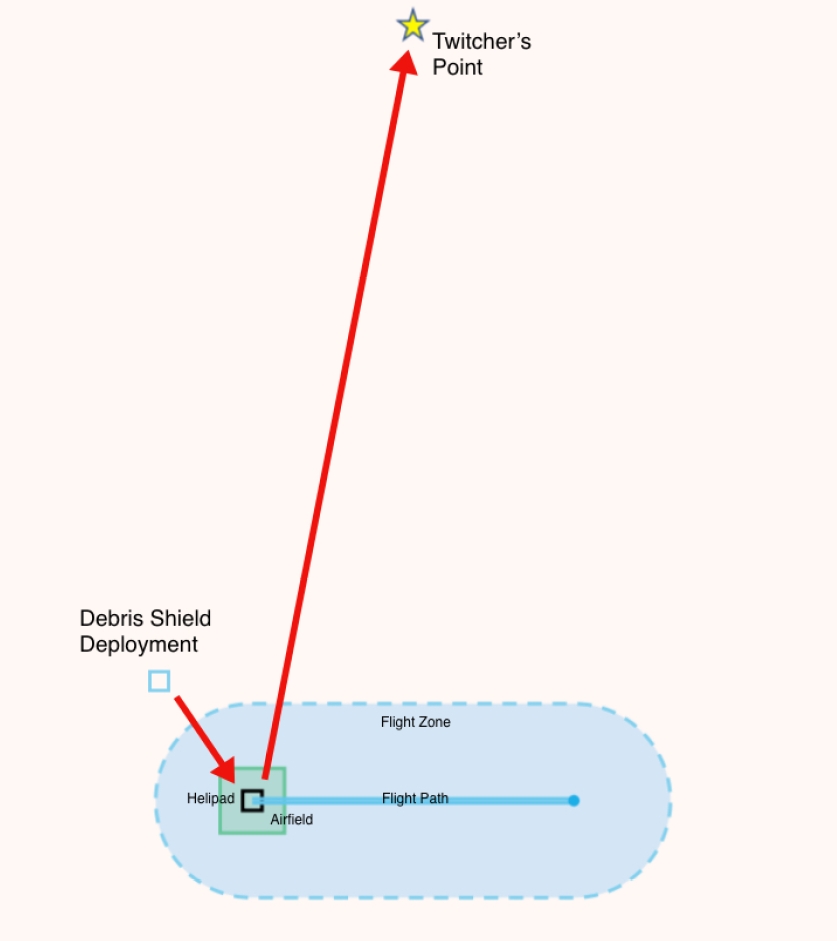
Helipad – (černý čtverec) je oblast 3 x 3 m, kde rover Perseverence vysadí helikoptéru Ingenuity. Tato oblast by měla být zcela bez kamenů vyšších než 5 cm a mít v průměru sklon menší než 5°.
Airfield – (zelený čtverec) je oblast 10 x 10 m, obklopující Helipad. Zde by mělo být co nejméně kamenů vyšších než 5 cm, průměrný sklon do 4°.
Flight Zone – letová oblast ve tvaru protáhlého oválu o šířce 30 m a variabilní délce podle zvolené letové trasy (Flight Path). Terén v této zóně musí obsahovat dostatek povrchových útvarů pro autonomní sledování pohybu helikoptéry.
Debris shield deployment – (modrý čtverec) lokalita 3 x 3 m, kde rover odhodí kompozitní kryt helikoptéry. Bude vzdálena minimálně 15 m od okraje Helipadu. Neměla by mít sklon více než 10° a povrchové překážky, které by mohly snížit svislý odstup odhozeného krytu od helikoptéry na méně než 5 cm.
Twitcher’s point – (žlutá hvězda) je parkovací místo roveru Perseverence během testovacích letů Ingenuity. Bude vzdáleno přibližně 100 m od okraje letové oblasti. Mělo by být na relativně rovném povrchu a musí dovolovat přímý a nepřerušený výhled na celou letovou oblast kvůli pozorování a radiovému spojení. Pojem „Twitcher“ pochází z Británie (teď i z Marsu) a označuje ornitologa, který cestuje na velmi dlouhé vzdálenosti, aby pozoroval velmi vzácné ptáky.
Technická data helikoptéry Ingenuity a parametry provozu
| Výška | 0,49 m |
| Průměr protiběžných rotorů | 1,22 m |
| Rozsah otáček rotorů | 50 - 2400 1/min |
| Hmotnost (na Zemi) | 1,8 kg |
| Rozměry trupu | 0,136 × 0,195 × 0,163 m |
| Délka 4 nohou z uhlík. kompozitu | 0,38 m |
| Světlá výška | 0,13 m |
| Zdroj energie | FV panel nabíjí 6 komerčních Li-ion baterií |
| Příkon nutný na 90 s letu | 350 W |
| Komunikace s roverem | UHF link 900 MHz |
| Max. datový tok komunikace | 250 kb/s (až do vzdálenosti 1000 m) |
| Velikost přistávací oblasti (Airfield) | 10 × 10 m |
| Typická výška vodorovného letu | 3 – 5 m |
| Typická délka letu od místa startu | 50 m |
| Max. doba 1 letu | 90 s |
| Max. počet letů | 5 |
| Aktuální min. teplota okolí | -90°C |
| Cena mise Ingenuity (stavba, integrace, provoz) | 85 mil USD |
Zdroje informací:
https://spectrum.ieee.org/automaton/aerospace/robotic-exploration/nasa-designed-perseverance-helicopter-rover-fly-autonomously-mars
https://mars.nasa.gov/resources/25530/mars-helicopter-ingenuity-landing-press-kit/
Zdroje obrázků:
https://spectrum.ieee.org/automaton/aerospace/robotic-exploration/nasa-designed-perseverance-helicopter-rover-fly-autonomously-mars
https://mars.nasa.gov/resources/25530/mars-helicopter-ingenuity-landing-press-kit/
https://photojournal.jpl.nasa.gov/gallery/snt?subselect=Spacecraft%3AIngenuity%3A





Díky za zajímavý článek. Ta cena za helikoptéry cca 1,5 mld. Kč je obrovská, vlastní výrobní náklady tvoří jen mizivý podíl, všechno to je duševní práce. Samozřejmě jsou to účelně vynaložené peníze do budoucna. Pokud se to ukáže jako schůdná cesta, bude to mít velký význam pro průzkum Marsu – např. Údolí Marinerů.
Jsem rád, že se vám článek líbil.
NASA už nějakou dobu pracuje na misi Dragonfly, která by měla vysadit létající laboratoř na Saturnův měsíc Titan. Start je zatím v planu na 2026 a přistání na Titanu ve 2034. Více najdete například tady: https://www.nasa.gov/press-release/nasas-dragonfly-will-fly-around-titan-looking-for-origins-signs-of-life
Díky za odkaz. Na Titanu to však bude v mnoha aspektech jiné, většinou příhodnější, zejména je tam, pokud se nemýlím, tlak atmosféry vyšší než na Zemi a nižší gravitace než na Marsu, což obé umožní vyšší nosnost. Na druhé straně bude problém se zdrojem energie. V každém případě to velmi zajímavé a přínosné.
Úžasné. (BTW: spotřeba energie na 90s letu ve Wattech?)
Díky za upozornění, opraveno.
Výbornej článek, díky za něj, na Ingeunity se opravdu moc těším.
Jen mě tak napadlo, pokud bude vrtulníček pořád funkční, proč ho nedržet v dosahu roveru, ten popojede a vrtulníček popoletí za ním. Rover přece taky pořád nejede a dělá i delší zastávky, takže by mohl mít dost času se zase dobít…
Mise Ingenuity má pouze ověřit novou technologii. Dostali na to měsíc času, což by mělo stačit. Dál by to mohlo být pro primární misi Percy buď zdržování, zvyšování rizika, nebo zbytečné čerpání dalších lidských a finančních zdrojů. Takže další prodlužování provozu nepředpokládám.
Tomu všemu rozumím, ale za předpokladu, že bude pořád fungovat mi přijde škoda, ji zahodit…
Svůj úkol už bude mít splněný. Navíc bych si tipnul, že při pátém letu budou chtít vyzkoušet některé krajní parametry letové obálky a helikoptéra bude na závěr letu „spotřebována“.
Ono to nespíš plně záleží na týmu Perseverance. Lidé od Ingenuity samozřejmě budou chtít fungovat co nejdéle jim bude umožněno a pokud to bude dvakrát nebo třikrát tolik, jsou na to připraveni a nebudou nic namítat. A kdo ví. Třeba budou výsledky vrtulníku až nečekaně dobré a pak si myslím, že může dojít k prodloužení.
Taky jsem čekal, že to bude trvat dýl. Jakože pokud testy vyjdou, tak bude putovat spolu s roverem, dokud se Ingenuity nerozpadne…
Ale chápu že je to náročné na komunikaci a ovlivňuje to Perseverance, takže těch 30 dní má smysl
Netušíte někdo, jakým způsobem to bude měnit směr letu? Změna těžiště, naklánění osy vrtulí?
Podobně jakou u klasického vrtulníku mají oba protiběžné rotory kolektivní a cyklické řízení úhlu náběhu listů rotorů. Konkrétně kolektiv v rozsahu -4.5° až 17.5° a cyklika ±10°.
Podrobnosti neznám, ale řekl bych, že téměř jistě vše na Linuxu neběží. Není to realtime OS. Na tom ARM procesoru s Linuxem je určitě vlastní „inteligence“, zpracování obrazu apod… Automatické řízení (aby to nespadlo a bylo to stabilní) bude nejspíš realizováno jinde:
V nižších vrstvách „pod počítačem“, na kterém běží Linux jsou mikrokontroléry a programovatelné hradlové pole (FPGA) a právě zde bude specializovaný firmware, zpracovávající data ze senzorů a reagující v reálném čase – tedy regulace.
To pochopitelně nemění nic na tom, že Linus Torvalds může být na své dítě oprávněně hrdý. Funguje skvěle nejenom například v PC, ze kterého teď píšu, ale už je připraveno i v dronu na Marsu :). Takový úspěch tenkrát, když s tím ještě sám jako student začínal, určitě nečekal.
Jistě, ale je to, jako kdybyste řekl, že počítač neběží úplně na Linuxu, protože řadič diskového pole nebo grafická karta v sobě mají proprietární software/firmware. Jinak existují verze Linuxu případně moduly do jádra použitelné pro realtime řízení. Se standardním přepínáním vláken se toho moc uřídit nedá.
On krome toho Snapdragonu je tam jeste druhy procesor, ktery od zacatku je navrzen pro real-time (ma mektere realtime specificke vlastnosti a periferie).
Konkretne TI TMS570LC4x (pise NASA v materialech, nejspise se se jedna o TMS570LC4357). A to by prave melo byt to rizeni letu (flight-control)
To je taky mimochodem take zajimavy procesor. 2 jadra na jednom kremiku, ktere jsou vzajemne na kremiku pretocene, druhe jadro je o par taktu casove posunute a vykonava stejny kod jako prvni jadro. Vysledek se porovnana mezi sebou. Celkem bezny automotive procesor pro „hracky“ s potrebnou urovni spolehlivosti (SIL3). Co me prekvapilo je komunikace s hlavnim pres UART, cekal jsem neco propustnejsiho, predevsim s ohledem na latence.
O konkretnim rozdeleni uloh mezi procesory a o operacnim systemu v tom real-timovem ARMu me neni nic znamo.
https://rotorcraft.arc.nasa.gov/Publications/files/Balaram_AIAA2018_0023.pdf
Díky za link na tento dokument.
Co že! Ingenuity měří 49 CM? To je k neuvěření.
Jo, taky jsem si myslel, že je to jen drobeček. Taková hračka, se kterou si létají děti po pokoji. Přitom je to docela macek. Muselo dát pořádnou práci zvolit správnou velikost, aby to zvládalo nejen létat v řídké atmosféře, ale i zajistit si napájení, odolnost vůči mrazu, orientaci a komunikaci.
Klíčovým parametrem při návrhu byla max hmotnost do 2 kg. Podařilo se ji stlačit na ~1,8 kg.
Mě by davalo smysl fotit z vysky i bez vrtulniku. kdyby auto melo katapult, tim vyhodilo kulovou kameru do vysky pri presnem vyladeni vodorovne polohy auta presne rovne nahoru treba 10 az 20 m a potom by kameru chytilo do site jako maji lode pro chytani krytu raket. pak roboticka ruka by kameru sebrala a vratila do katapultu. síť na tyckach by byla skladaci. kamera by byla koule s objektivama jako se prodava na hazeni a udelala by kompletni panoramu, na sobe by mohla mit hodne kovovych plosek pro dobijeni jen polozenim treba na dve tycky. kdyby koule nahodou spadla mimo, mohli by uvnitr odpruzene kamery prezit v dute kouli s mezerou a pruzinama, kameru na zemi by pak sebrala roboticka ruka. obrazy kamer by se odeslali do auta radiove nebo polozenim na kontakty. do presne vodorovne polohy by se pripadne mohl srovnat jen katapult. nebo na piscite rovine auto ruznym zahrabanim kol.
Já teda nevím, ale ten váš systém mi přijde komplikovanější než vrtulník – ten navíc může v ostrém provozu (ne při aktuálním testování) letět i několik desítek metrů před roverem.
Přišlo mě to jako primitivnější technika a s malou spotřebou, ale když bude fungovat super technika jako vrtulník tak to budou samozřejmě větší možnosti. Katapult by udělal panoramu v aktuální poloze auta třeba v deseti metrech, takže by byl hezký rozhled do okolí a to mě přišlo efektivní, že to celkem stačí jako mít sebou rozhlednu, ale vrtulník se samozřejmě může podívat dál. Když se ještě neprodávali drony, tak jsem uvažoval o něčem takovým na focení, fotka v nejvyšším bodě, kdy je foťák skoro bez pohybu.
Vědecké kamery MastCam-Z i navigační NavCamy jsou umístěny na otočné hlavici na vrcholu kamerového sloupku ve výšce 1,98 m nad terénem. Pro pořizování všech potřebných panoramat to jak řidičům roveru, tak vědcům, plně postačuje. V kombinaci se satelitními snímky oblasti, kde se rover pohybuje, v rozlišení 0,3 m /px mají všechny týmy dostatek obrazových informací a to i ve 3D jak z povrchu, tak z orbitální dráhy.
Váš návrh s katapultovací kamerou by velmi pravděpodobně nepřinesl žádné užitečné informace navíc, ale zároveň by neúměrně zvýšil riziko poškození citlivých přístrojů na horní palubě roveru v případě nezachycení padající kamery.
Jo riziko by mohlo být, to by záleželo na roveru s katapultem jak by byl konstruovaný a jak by měl umístěnou síť. Minimálně by byl mimo síť ten kamerový sloup, ten by asi musel mít z vrchu nárazník 🙂 Vyhazovaná kamera by naštěstí asi byla hodně lehká. V čem ale mám určitě jiný názor, že by to nepřineslo užitečný záběry na víc. Možná se shodnem, že budoucí vrtulníky přinesou užitečné záběry pro jízdu roveru. Jednak proto co by katapult neuměl a to podívat se na terén ze vzdálenějšího místa a jednak i jen díky tomu že vrtulník se může podívat z větší výšky než ty 2 m. 2 m je samozřejmě dobrá výška pro řízení, ale malá pro průzkum okolního kopcovitého terénu, kde teda to zatím doplňují pouze družice a já věřím, že výhledy z vrtulníku významně pomůžou těm dvěma záběrům co píšete a jiná věc je že věřím že i výhled kousek výš nad roverem by účinně pomohl, ale vůbec nevadí že máme jiný názor 🙂 Já se samozřejmě teším na úspěchy vrtulníku a kdyby nějaký budoucí např uměl přistávat na roveru, vozit se a dobíjet se tam a občas vyletět pro získání lepšího přehledu, tak to si dávno představuju jako hodně dobrý. Samozřejmě vrtulník nebude dobrý jen pro plánování jízdy, ale i např pro průzkum skal na vnitřní hraně větších kréterů a údolí, kam se aspoň současný rover vůbec nedostane. Snad až ten plánovaný budoucí, co se rozpůlí a půlka pojede na laně dolu ze srázu a zpět. To bude taky super technika 🙂